Kada je potrebno kontrolisati rad LED kanala većih struja, recimo do 500mA, Ti TLC59213 je odlično rešenje. U pitanju je 8-bitni paralelni I/O strujni drajver sa darlington izlazima koji se mogu lečovati.
Rešenje jeste standardno i lako i odlično je za prikaz paralelne komunikacije između mikrokontrolera i integralnog kola – drajvera u ovom slučaju.
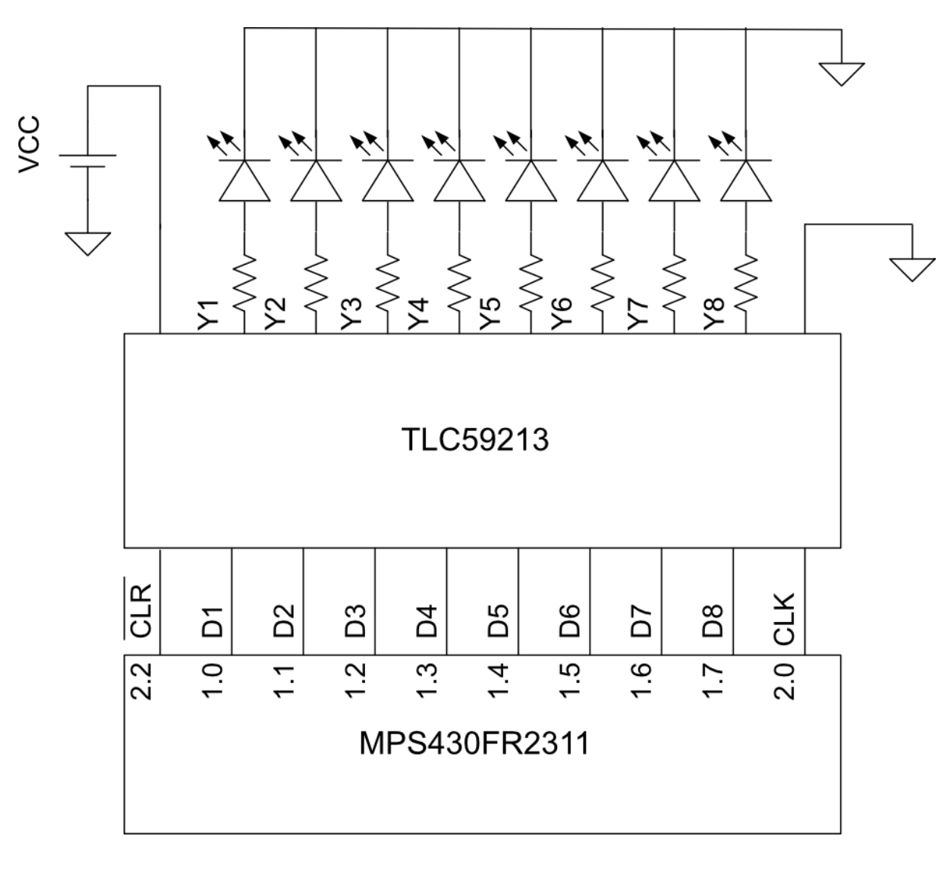
U projektu je korišćen Ti MSP430FR2311, ali se uz minimalne modifikacije može koristiti bilo koji mikrokontroler. Sve što je potrebno jeste jedan 8-bitni I/O port (u ovom slučaju je korišćen Port1, pinovi 0 do 7). Port je konfigurisan kao izlazni, sa početnim stanjem pinova 0.
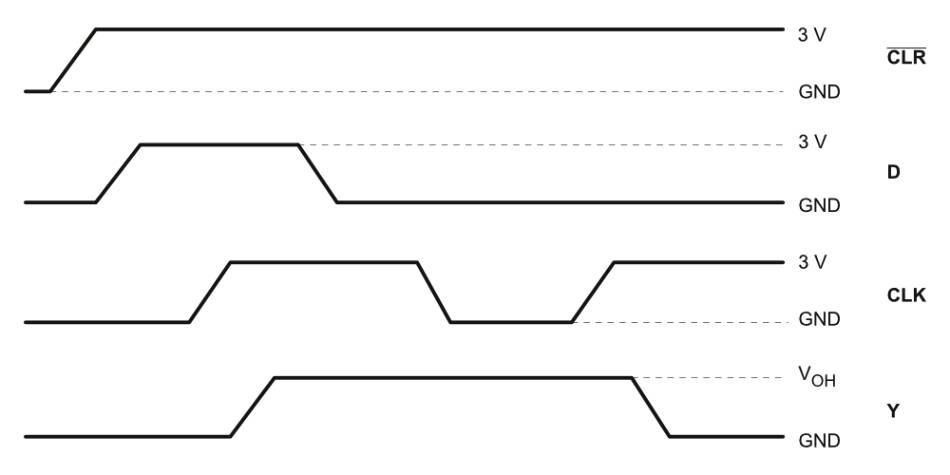
Za upravljanje radom TLC59213 potrebna su još dva signala. CLK i CLR. Ulaz CLK služi za lečovanje izlaznih pinova kola, sa tim da se vrednost stanja na ulaznim pinovima D1…8, na koje dovodimo Port1, lečuje na izlazima Y1..8. „1“ na ulazu Dn, omogućava proticanje struje kroz Yn i time se pali diodni niz na n-tom kanalu. Ovaj signal je u primeru dodeljen Pinu 0 na Portu 2 mikrokontrolera.
Pinu 2 porta 2 dodeljen je signal CLR, koji gasi sve izlaze ukoliko mu je vrednost „0“, tj uključuje kolo TLC59213 ukoliko je njegova vrednost „1“. Port 2 je stoga definisan na svim pinovima kao izlazni port, sa standardnom vrednošću „1“.
Da bi implementacija bila zanimljivija, mikrokontroler i u ovom primeru radi u lowPower režimu i pali se samo kada je potrebno promeniti stanje na diodnim kanalima. Da bi iz ovog režima izašao, koristi se standardno rešenje – interapt. Interapt rutina je vezana za prekidač koji je postavljen na Pinu 1 Porta 2, te je stoga samo ovaj pin definisan kao ulazni. Interapt rutina data je na kraju koda. Zbog ilustrativnosti, nakon klika prekidača, menja se šema sijanja LED kanala.

Posebno je napisana funkcija setLED(stanje,trajanje) koja osmobitnom binarnom vrednošću promenjive stanje definiše novu šemu sijanja kanala, dok se u promenjivoj trajanje postavlja vrednost broja taktova nakon čega se diodni niz gasi. Na taj način je moguće odrediti vreme sijanja.

Kontrola struje kroz kanale vrši se otpornikom koji se povezuje na redno na diodni niz. Željena struja se može dobiti jednostavnom formulom I=(Vcc-Vl-Vce)/R, gde je Vcc napon napajanja diodnih nizova, Vl ukupni pad napona na diodama u jednom nizu i Vce je 1,6V napon kolektor-emiter na darlingtonu. U ovom primeru, da bi testirali rad, koristili smo Vcc=5V, obične led diode sa 2,9V padom napona u režimu rada i otpornike od R=220ohm. Struja koja je tekla u tom slučaju je svega 2,27 mA, što je dovoljno za prikaz rada, mada bi prava primena ovog drajvera bila za stotinak puta veće struje.
Kompletan kod je dat na gitHubu, kao i na kraju ovog teksta.
// MSP430FR2311 paralelna komunikacija sa Ti TLC59213 LED 8 kanalnim drajverom
// sa darlington izlazima do 500mA po kanalu
// Implementirane funkcije:
// setLED (buffer, duration)
// - buffer: 0b******** - pozicija bita pali jedan od 8 kanala
// - duration: dužina trajanja sijanja LED kanala
//
// MSP430FR2311
// -----------------
// /|\| |
// | | |
// --|RST |
// | P1.0...7|-> Led kanal 0...7
// | P2.0|-> CLK
// | P2.2|-> ~CLR
// BTN->|P2.1 |
//
// OPIS: Klikom na prekidač BTN, MSP izlazi iz sleep moda i
// interapt rutinom menja šemu sijanja LED kanala
//
//
// magazinMehatronika @ eduIoT
// April 2020
//******************************************************************************
#include <msp430.h>
unsigned int m=0x00;
void setLED (unsigned int buffer, unsigned long duration) // SetLED (LED output, duration) function
{
P2OUT |= BIT2; // CLR high
__delay_cycles(50);
P1OUT |= buffer; // Data set
__delay_cycles(50);
P2OUT |= BIT0; // CLK high
__delay_cycles(50);
P2OUT &= ~BIT0; // CLK low
__delay_cycles(50);
P1OUT = 0x00; // Data clear
__delay_cycles(50);
while ((duration--)>0)
__delay_cycles(1);
P2OUT &= ~BIT2; // CLR low
__delay_cycles(50);
}
/**
* main.c
*/
int main(void)
{
WDTCTL = WDTPW | WDTHOLD; // Stop watchdog timer
P1DIR |= BIT7 | BIT6 | BIT5 | BIT4 | BIT3 | BIT2 | BIT1 | BIT0; // P1.0...7 as out
P1OUT &= ~(BIT7 | BIT6 | BIT5 | BIT4 | BIT3 | BIT2 | BIT1 | BIT0); // P1.0...7 low
P2DIR |= BIT7 | BIT6 | BIT5 | BIT4 | BIT3 | BIT2 | BIT1 | BIT0; // P2.0...7 as output
P2OUT &= ~(BIT7 | BIT6 | BIT5 | BIT4 | BIT3 | BIT2 | BIT1 | BIT0); // P2.0...7 high
P2DIR &= ~BIT1; // P2.1 as input
P2OUT |= BIT1; // Configure P2.1 as pulled-up
P2REN |= BIT1; // P2.1 pull-up register enable
P2IES |= BIT1; // P2.1 Hi/Low edge
P2IE |= BIT1;
PM5CTL0 &= ~LOCKLPM5; // Disable the GPIO power-on default high-impedance mode
// to activate previously configured port settings
P2IFG &= ~BIT1; // P2.1 IFG cleared
while (1)
{
__bis_SR_register(LPM3_bits | GIE); // Enter LPM0,enable interrupts
__no_operation(); // For debug,Remain in LPM0
}
}
#pragma vector=PORT2_VECTOR
__interrupt void Port_2(void)
{
switch (m) {
case 0:
{
m=1;
setLED (0xff, 65000);
}
break;
case 1:
{
m=2;
setLED (0x44, 65000);
}
break;
case 2:
{
m=0;
setLED (0x88, 65000);
}
break;
default:
break;
}
P2IFG &= ~BIT1; // Clear P2.1 IFG
__bic_SR_register_on_exit(LPM3_bits); // Exit LPM3
}
// UNUSED_HWI_ISR()
#pragma vector=UNMI_VECTOR
#pragma vector=WDT_VECTOR
#pragma vector=TIMER1_B0_VECTOR
#pragma vector=TIMER1_B1_VECTOR
#pragma vector=TIMER0_B0_VECTOR
#pragma vector=TIMER0_B1_VECTOR
#pragma vector=PORT1_VECTOR
// #pragma vector=PORT2_VECTOR
#pragma vector=ECOMP0_VECTOR
#pragma vector=ADC_VECTOR
#pragma vector=EUSCI_B0_VECTOR
#pragma vector=EUSCI_A0_VECTOR
#pragma vector=RTC_VECTOR
#pragma vector=SYSNMI_VECTOR
#pragma vector=RESET_VECTOR
__interrupt void UNUSED_HWI_ISR (void)
{
__no_operation();
}