

DFRobot UNIHIKER K10
DFRobot UNIHIKER K10 je ekonomično i kompaktno STEM učilo za niže razrede, početnike, ali i mejkere kojima je potreban objedinjen ekran sa kamerom baziran na ESP32-S3-WROOM modulu za svoje projekte .
Pros
- Prigodna cena za pametan ekran sa kamerom i micro:bit konektorom
- Mogućnost lakog rada u blokovima i MicroPython-u uz dovoljno datih primera na sajtu
- Odlično dizajniran model za kućište spreman za 3D štampu
Cons
- Ekran nema tač
- Arduino podrška je još u razvoju
- Mind+ u verziji 1.8 ne radi na Linux OS-u
DFRobot je proširio svoju UNIHIKER seriju novim modelom UNIHIKER K10, a postojeći model baziran na RockChip RK3308 SoC-u preimenovao u UNIHIKER M10. O ovom odličnom STEM učilu smo već pisali u UNIHIKER M10 recenziji, a sada nam je u fokusu novi AI model.
Napomena 23.04.2025.: DFRobot tim nam je odmah nakon objave naše recenzije dao dodatna objašnjenja koja su bitna za verodostojnost ove recenzije.
UNIHIKER M10 pokreće Linux OS na sebi, ali kako RK3308 nema GPU, generisanje slike se vrši preko serijskog porta prigodnim funkcijama. Brzina je sasvim odgovarajuća svrsi, a to je vizuelizacija podataka i stanja uređaja u STEM i prilagođenim projektima. UNIHIKER K10 targetira mlađi uzrast korisnika, pre svega osnovnu školu do osmog razreda i ideja je da bude AI sposobno IoT STEM učilo koje se programira blokovima, u Arduino IDE ili Python-u i ima integrisan displej, kameru i osnovni set „environment“ senzora uz mogućnost nadogradnje.
Osnovne tehničke razlike između UNIHIKER K10 i M10 modela, su to što je K10 baziran na mikrokontroleru sa dva ESP32-S3 Xtensa LX7 jezgra i podržava Machine Learning kroz TinyML, dok M10 pokreću četiri ARM Cortex-A35 jezgra u CPU-u i na njemu je moguće pokrenuti i AI modele poput YOLO, MobileNet ili MediaPipeAI.
Hardver
UNIHIKER K10 po izgledu i formatu 51.6x83x11 mm neodoljivo podseća na svog starijeg brata M10, tako da se na prednjo strani opet nalazi LCD ILI9341 2.8 inčni kolor ekran, sa tim da ovog puta nije sa tač funkcijom. Maksimalna rezolucija mu je 240 x 320 tačaka, što je dovoljno za STEM upotrebu i vizuelizaciju podataka.
Akviziciju veličina može vršiti preko dodatnih senzora priključenih na ugrađene I2C ili UART konektore, ali i preko sopstvenih senzora. U gornjem desnom uglu je grupisana većina njih: dva MEMS mikrofona, senzor osvetljenja LTR303ALS opsega 0-64 kLux i senzor temperature i vlage vazduha AHT20 opsega -40-85±0.3 ℃ i 0-100±2 %RH. Sa zadnje strane nalazi se i akcelerometar primenjiv za određivanje pravca i smera pomeraja uređaja, a time i objekta na koji je postavljen. Machine Learning je omogućen kroz TinyML koji se može koristiti na Espressif ESP32-S3 SoC-u.

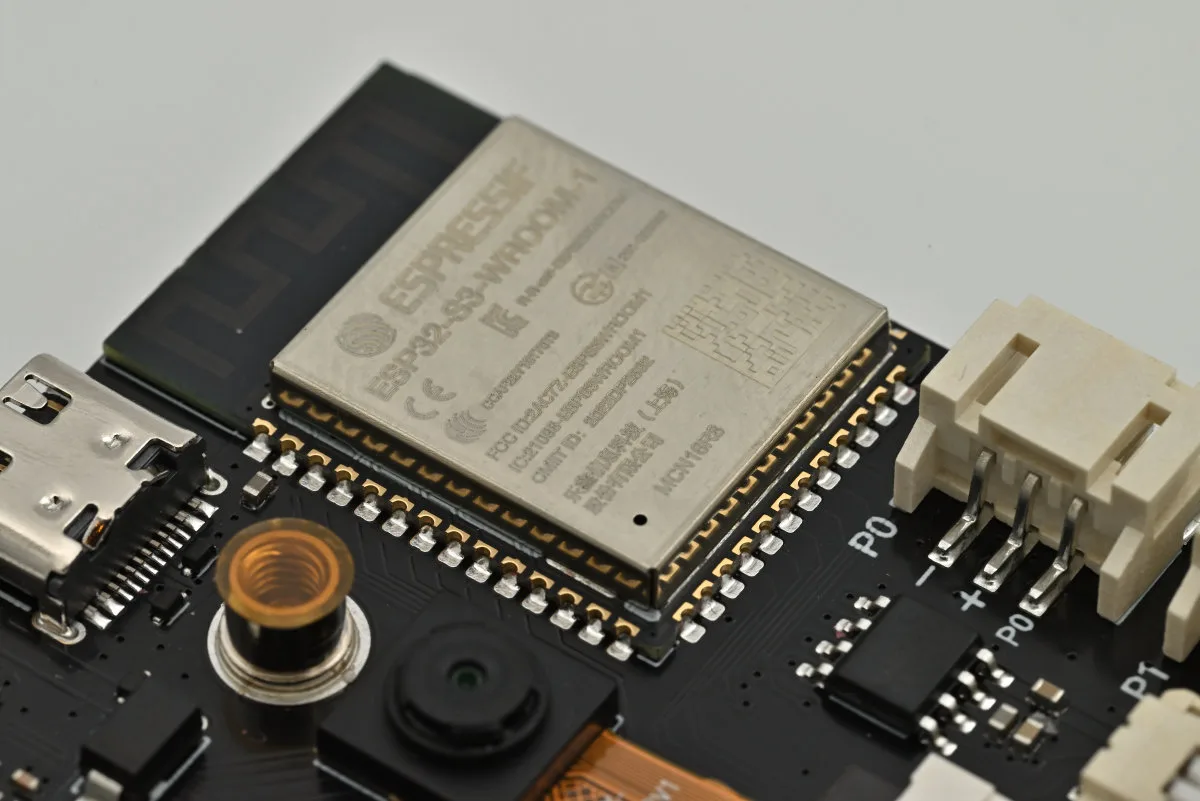
Espressif ESP32-S3-WROOM-1-MCN16R8 je dobro poznat i prihvaćen modul koji integriše dva ESP32-S3 Xtensa LX7 jezgra na 240 MHz, 16 MB SPI flash-a, 8 MB PSRAM-a, 2.4 GHz Wi-Fi i Bluetooth 5.0 radio i pripadajuću PCB antenu. Pored adekvatne procesorska snage za prikupljanje i obradu podataka sa senzora i bežičnu komunikaciju, čineći ga odličnom osnovnom za IoT uređaje, ESP32-S8 može koristiti TinyML i time obezbediti bazične „AI“ funkcije prepoznavanja i detekcije naučenih paterna.
Kao i moćniji UNIHIKER M10 i ovaj K10 model ima micro:bit konektor sa originalnim raspored signala na njemu, što omogćava upotrebu mnogih postojećih micro:bit dodataka i integraciju i zamenu micro:bit razvojnog sistema sa UNIHIKER K10, koji je daleko versatilniji.

Iako DFRobot ima nekoliko micro:bit Carier Board-ova koji su svi u potpunosti kompatibilni sa UNIHIKER K10 modelom, obratite pažnju da po našem uverenju najinteresantniji, Motor Driver carier koga smo takođe imali na recenziji, nije u potpunosti podržan. Naime, podržani su samo GPIO pinovi i I2C interfejs, dok osnovna namena ove ploče, upravljanje radom motora nije moguća.
Napomena 23.04.2025.: Iz DFRobot-a nam je rečeno da je micro:Driver – Driver Expansion Board for micro:bit / UNIHIKER M10 / K10 njihova preporuka ekspanzione ploče za kontrolu motora.

Na poleđini UNIHIKER K10 nalazi se veći broj raznih konektora. Tu su dva tropinska konektora sa kombinacijom +,-,P0 i +,-,P1 i jedan četvoropinski I2C konektor za I/O povezivanje perifernih senzora ili signalizatora. Tri WS2812 RGB led diode su pozicionirane uz sam micro:bit konektor. Najzad jedini USB-C konektor služi za napajanje, programiranje i serijsku komunikaciju UNIHIKER K10 sa računarom. Dodato je i push-push ležipte za SD karticu na koju se mogu po potrebi skladištiti podaci.

Da bi sačuvali komponente od oštećenja prilikom korišćenja, preporučujemo da izradite kućište čiji STP i STL fajl možete preuzeti sa sajta proizvođača. Model je odlično projektovan i precizno naleže na ploču ostavljajući sve konektore pristupačnim. Realizovana su i tri dugmeta za reset, A i B taster, kao i otvor za kameru i BOOT dugme. Da zaštita ne bi spala prilikom korišćenja, predviđeno je da se fiksira zavrtnjem. micro:bit konektor ostaje potpuno slobodan i zaštita ne smeta prilikom upotrebe.

Kao što smo već pomenuli, jedini preostali senzor se nalazi na poleđini. U pitanju je akcelerometar SC7A20H sa maksimalnim mernim opsegom ±16 G. Tu su i dva programabilna tastera označena sa A i B, kao i RST (reset) dugme u samom uglu.

Centralno postavljena je 2MP kamera GC2145 sa širinom vidnog polja od 80°. Dobijena RGB slika sa kamere je dimenzija 1616 x 1232 tačaka i pokazala se dobrim rešenjem u mnogim mejkerskim projektima koji podrazumevaju: Machine/Computer Vision, robotiku, IoT ili digitalnu proizvodnju, gde su brzina rada i kvalitet slike dovoljni za prepoznavanje objekata, što bi i ovde bila primarna upotreba.

UNIHIKER K10 ima i 2W zvučnik čija uloga je u reprodukciji govora ili zvuka kao odgovor na zadatu komandu, potvrdu snimljenog prilikom prepoznavanja govora ili sličnih naprednih AI upotreba. Bazzer koji se obično koristi u ovom slučaju bi bio neprimenjiv.

Da bi bio prenosan uređaj se mora baterijski napajati. Stoga se na ploči nalazi i dvopinski JST-PH 2.0 mm konektor za Li-Ion bateriju, malo uvučen u odnosu na ivicu i ostale konektore.

Zanimljivo je prisustvo dva čipa na ploči. Jedan je Xinluda XL9353 I/O ekspander koji preko I2C interfejsa vezanog za P19 (SCL) i P20(SDA) pinove povežavaju broj I/O linija na za 18, od kojih su dve povezane na tastere A(P5) i B(P11), a tri iskorišćene za funkcionisanje samog UNIHIKER K10.
Drugi interesantan čip je Gotop GT30L24A3W Font čip povezan preko SPI veze koji omogućava hardversku lokalizaciju prikazanog teksta sa UNICODE ISO8859 kodnom stranom. ASCII znaci su podržani u dimenzijama 12×12, 16×16, 24×24 i 32×32, ali su internacionali karakteri podržani samo u 12×24 dimenziji. Na ovo treba obratiti pažnju jer inicijalni ispis funkcijama koje su date u Mind+ neće imati karakteristična slova, poput: č, ć, š, đ, ž i slično.

Softver
Prvi korak u programiranju ovof STEM učila je svakako DFRobot-ov Mind+. Nalikuje prilagođenoj verziji Microsoft Code::Blocks DFRobot ekosistemu. Svakome kome je Microsoft Code::Blocks blizak, korišćenje ovog IDE će biti trivijalno.
Nakon startovanja i priključenja UNIHIKER K10 za PC potrebno je izabrati UNIHIKER K10 kao Board nakon klika na Extensions+ u donjem levom uglu. Nažalost nova verzija Mind+ V1.8 koja je neophodna za ovaj STEM suređaj se može pokrenuti samo sa Windows računara, za razliku od starijih koje mogu koristiti Linux OS.

Uz UNIHIKER K10 možete dodati i jedan broj, ali ne sve, DFRobot senzore. To nam je zasmetalo, jer recimo odlične: MEMS Smoke Sensor SEN0570 ili Gravity Voice Recognition SEN539 nismo našli među podržanima.
Napomena 23.04.2025.: Za MEMS Smoke Sensor sa analognim izlazom i slične senzore može se direktno koristiti Read analog value blok u Mind+. Generalna ideja je da se ne daje podrška za Fermion senzore, jer nemaju ugrađene konektore za povezivanje, te nisu pogodni za korišćenje u osnovnoj STEM obuci.
Mada, tu je bila Gravity HASKYLENS AI kamera. U primeru na slici ispod bez problema smo povezali UNIHIKER K10 na lokalnu Wi-Fi mrežu i poslali poruku na MQTT server.

U desnom prozoru Mind+ generiše Arduino C kod koji bi mogao da se koristi u Arduino IDE. U tom sličaju se programiranje može nastaviti i u Arduino IDE. Naravno, mogu se razvijati i aplikacije za Mind+ nepodržane senzore, poput pomenutog MEMS Smoke Sensor-a (SEN0570), ali je pre toga potrebno dodati UNIHIKER K10 opis u Arduino IDE.
https://downloadcd.dfrobot.com.cn/UNIHIKER/package_unihiker_index.json
DFRobot je tek nedavno dodao ovu podršku za Arduino IDE i sada je u verziji 0.0.1 te ne treba očekivati previše. Zapravo je to modifikovana ESP32-S3 development board definicija prilagođena UNIHIKER K10 modelu. Ovde tek očekujemo od DFRobot tima da „učini magiju“ i potpuno podrži svoj uređaj.

Poptuno urađen je MicroPython, ali je neophodno zameniti firmver. Sa Espressif sajta treba preuzeti Flash Download Tool, a od DFRobot-a UnihikerK10 MicroPython firmver i flešovati ga po datom uputstvu sa Wiki-a. Napomena: Nemojte da zaboravite čeker ispred imena fajla pre flešovanja. Flešovanje se mora uraditi na Windows PC-u, jer Espressif nema Linux verziju svog softvera.

Međutim dalji rad je moguć gde god imate Thonny ili neki drugi MicroPython IDE. DFRobot je dao veći broj programskih primera koji koriste sve aspekte ovog urađaja, ali nije dao ni jedan primer Machine Learning aplikacije.

Mi smo i u MicroPython-u isrobali povezivanje na Wi-Fi mrežu i MQTT server i čim je server bio podignut, UNIHIKER K10 se bez problema povezao i poslao poruku.

Zaključak
UNIHIKER K10 je višenamensko STEM učilo koje se može programirati u blokovima, Arduino C i MicroPython-u i stoga je prilagođeno za niže razrede školovanja ili one koji ulaze u svet embedovanog programiranja. Bazirano je na Espressif ESP32-S3-WROOM modulu koji mu omogućava bežično povezivanje i dovoljno snage za akviziciju i obradu podataka sa senzora, čak i elementani MAchine Learning kroz TinyML. Veći broj GPIO linija, kao i I2C intefejs omogućavaju povezivanje široke palete DFRobot Grove i drugih senzora, ali i periferija drugih proizvođača uz adekvatne biblioteke koje zavise od razvojnog okruženja.
micro:bit konektor daje mogućnost da se UNIHIKER K10 koristi kao napredna verzija micro:bit razvojnog sistema opremljen 2 MP kamerom i kolor ekranom. Displej je zadovoljavajućeg kvaliteta, mada bez tač mogućnosti, da na vizuelno atraktivan način može prikazati podatke ili stanja. Prepoznavanje objekata, položaja ili zvučnih uzoraka se radi u realnom vremenu uz upotrebu kamere, zvučnika i reprodukuje na displeju i ugrađenom zvučniku.
Kroz date demo programe, korisnik se brzo upoznaje sa mogućnostima ovog učila i može već kroz par koraka isprobati vizelne i audio AI aplikacije i sam ih programirati. Arduino podrška je tek u povoju, pa treba sačekati ili čak samostalno doprineti njenom razvoju. Mind+ (block) za sada mora da se radi na Windows računaru, dok MicroPython dopušta i Linux OS, ali nema Machine Learning demo programa ili uputstava za korišćenje „AI“ mogućnosti.
Napomena 23.04.2025.: DFRobot je par dana nakon naše recenzije dopunio Arduino IDE primere sa ML demoima na svom Wiki-u. Takođe, rečene su nam neke veoma bitne informacije o budućem razvoju. Linux verzija Mind+ otpočinje sa razvojem u Q4 2025., a do tada je fokus na optimizaciji AI mogućnosti platforme.
Iako se ova platforma promoviše kao AI, ona zapravo nije to u klasičnom smislu, jer ne poseduje NPU niti je moguće pokrenuti bilo koji od AI modela. Ovde je iskorišćena računarska snaga mikrokontolerskog jezga u Espressif ESP32-S3 da pokrene TinyML i da na osnovu statističkih podataka nauči da izvrševa određene funkcije, koje u osnovi liče na AI, ali je u pitanju, u industriji vrlo čest i mnogo manje zahtevan, Machine Learning.
UNIHIKER K10 po ceni ispod $30, što je gotovo upola od cene većeg UNIHIKER M10, je odlično i kompaktno STEM učilo koje lako stane u torbu ili džep. Može biti i prenosno ukoliko se opremi baterijom i adekvatnim kućištem koje bi moglo da se dobije modifikacijom modela koji smo i mi preuzeli sa DFRobot sajta. Svojom cenom sasvim opravdava nabavku za niže razrede i osnovne nivoe obrazovanja, posebno jer za samostalan rad nije potrebno ništa dodatno (osim PC računara i mi savetujemo 3D štampanog zaštitnog poklopca).