Autor: Pavle Nedučin
Mentor: Vera V. Petrović
Studijski program: Mehatronika
Kako je u Visokoj školi elektrotehnike i računarstva strukovnih studija u Beogradu 2013 godine počeo sa radom specijalistički studijski program Mehatronika (nastavak na osnovne studije – Automatika i sistemi upravljanja vozilima), ja sam imao tu čast da među prvima završim i odbranim specijalistički rad na tom programu. Ideja rada je da se formira platforma koja bi se dalje mogla koristiti od strane drugih studenata za unapređivanje znanja iz oblasti automatskog upravljanja.

Upravljanje asinhronim trofaznim motorom korišćenjem frekventnog regulatora jedan je od uobičajenih problema u ovoj oblasti i stoga je formirana platforma sa asinhronim motorom, frekventnim regulatorom i inkrementalnim enkoderom koja će moći da se povezuje na različite kontrolere i na taj način ispituju različiti vidovi upravljanja trofaznim motorom. Pored hardverske realizacije odrađena je i regulacija brzine motora korišćenjem „PLC“ uređaja i na taj način je izvršeno ispitivanje i testiranje platforme.
HARDVERSKA REALIZACIJA
Prvo što je bilo potrebno odraditi jeste izbor hardverskih komponenti. Neke komponente su već postojale u školi, a neke su naknadno nabavljene. Glavne komponente hardverskog dela (motor, frekventni regulator i inkrementalni enkoder) izabrane za ovaj rad su:
– Inkrementalni enkoder: OMRON E6B2-CWZ5B
– Frekventni regulator: OMRON JX4004
– Trofazni asinhroni motor: MAV-16 450VA
Inkrementalni enkoder je trokanalni sa 1000 zareza po kanalu što omogućava vrlo preciznu regulaciju pozicije/brzine motora. Frekventni regulator je izabran na taj način da podržava više vidova upravljanja i na taj način omogućava studentima dalje usavršavanje u oblasti industrijske automatike – upravljanja motorima. I na kraju, trofazni asinhroni motor je izabran tako da ima veliki broj pari polova radi vidljivijih karakteristika upravljanja i testiranja.
Nakon postavljanja ovih komponenti na noseću ploču, izvršeno je povezivanje sa ostalim komponentama i zaštitama (osigurači, releji, kleme) po šemi datoj na slici (Slika 1).
Finalno, hardverski deo rada izgleda kao na slici iznad i u potpunosti je kompatibilan sa test pločama koje se nalaze u laboratoriji za automatiku i na kojima se nalazi SIEMENS 1214C DC/DC/DC programabilni logički kontroler.
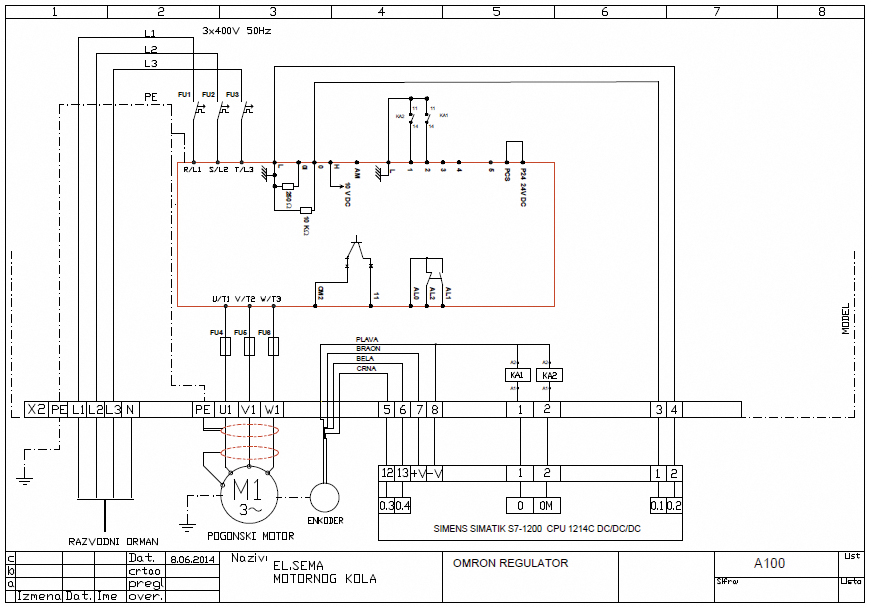
Slika 1: Šema povezivanja komponenti specijalističkog rada
SOFTVERSKA REALIZACIJA
Nakon formiranje hardverskog dela, pristupljeno je softverskoj realizaciji. Naime, putem programabilnog logičkog kontrolera zatvorena je jedna regulaciona petlja da bi se kontrolisala brzina motora. Prvo je isprogramiran proporcionalno integralni kontroler („PI“) u „PLC“ uređaju, koji je na osnovu trenutne brzine motora i zadate željene brzine, generisao odgovarajuće upravljanje i posredstvom frekventnog regulatora prosleđivao na sam elektromotor. Korišćenjem ovakve regulacije omogućeno je da motor održava konstantnu brzinu čak i pri uticaju proizvoljnih poremećaja. Takođe, formiran je i interfejs, korišćenjem mogućnosti softvera „TIA Portal“, na kome se može zadavati željena referenca (brzina rotacije), pratiti odziv motora, menjati parametri „PI“ kontrolera i nadgledati vrednost trenutnog upravljanja.
Na slici (Slika 2) je prikazan deo tog interfejsa (SCADA – Supervisory Control And Data Acquisition) koji ilustruje odziv motora (prikazan crvenom bojom) pri proizvoljnim promenama referentne vrednosti (prikazana plavom bojom). Sa slike se jasno vidi da upravljački sistem jako dobro radi, da odziv motora nema preskoka u brzini i da sa velikom tačnošću prati zadatu vrednost brzine. Jedina ograničenja su maksimalna brzina motora (oko 370 obr/sek u praznom hodu) i moment opterećenja koji motor može da savlada.

Slika 2: Deo SCADA sistema
ZAKLjUČAK I SMERNICE ZA DALjI RAD
Sam rad je realizovan tako da pruža velike mogućnosti za dalju nadogradnju kao i usavršavanje ostalih studenata kroz različite laboratorijske vežbe koje će se realizovati na njemu. Pored prikazane realizacije „PI“ kontrolera, maketa pruža mogućnost realizacije mnogih drugih vidova upravljanja. Osim tih različitih vidova upravljačkih mehanizama pri upravljanju brzinom brzinom motora, slični mehanizmi se lako mogu primeniti i u upravljanju pozicijom motora i eventualno ubrzanjem. Na ovaj način pokriva se širok spektar automatskog upravljanja motorima naizmenične struje što može biti jako kotisno u daljem radu i usavršavanju trenutnih i budućih studenata Visoke škole elektrotehnike i računarstva strukovnih studija.
Više informacija: Visoka škola elektrotehnike i računarstva strukovnih studija, Vojvode Stepe 283, 11000 Beograd/Voždovac, Srbija, tel: 011/2471-099, web: www.viser.edu.rs/asuv