O čemu se zapravo radi u ovom kratkom uvodu?
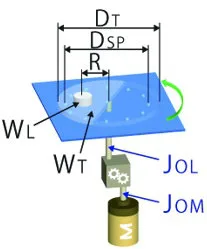
Analizirajmo dva primera izbora servo pogona za jednostavnu aplikaciju rotacionog stola. Pretpostavimo da je rotacioni sto cilindrično telo prečnika DT = 500 mm, sopstvene mase WT = 200 kg i mase opterećenja WL = 50 kg.
Odabir pogona u praksi
Razmotrićemo odabir pogona za dva slučaja:
- Opterećenje stola je ravnomerno raspoređeno na radijusu R1 = 100 mm
- Opterećenje stola je ravnomerno raspoređeno na radijusu R2 = 250 mm
U oba slučaja, radni ciklus izgleda identično – ¼ obrtaja za 2 sekunde sa rampom od 0,5 sekundi.
Izračunajmo potrebni prosečni obrtni moment. U prvom slučaju to je 10 Nm, a u drugom 14 Nm – razlika nije velika.
A šta je sa momentom inercije opterećenja? 6,75 kgm² u prvom slučaju i 9,40 kgm² u drugom.
Uzimajući to u obzir – koliki motor moramo izabrati u svakom od ovih slučajeva?
400 W u prvom, a… 1200 W u drugom (1). Samo zbog promene udaljenosti na kojoj je postavljeno opterećenje, drastično se povećala snaga/veličina motora. Zbog razlike od 4 Nm obrtnog momenta nastale usled promene radijusa na kojem se nalazi opterećenje? To možemo lako proveriti upoređujući nominalne obrtne momente oba motora. Motor od 400 W ima nominalni obrtni moment od 40 Nm, dok motor od 1200 W ima čak 120 Nm. Dakle, motori su predimenzionisani – rekla bi osoba koja se svakodnevno bavi tipičnim aplikacijama asinhronih motora u režimu regulacije brzine.
Međutim, kod pozicioniranja situacija je potpuno drugačija, jer – kao što je pomenuto na početku – moramo uzeti u obzir i moment inercije opterećenja. Za prvi motor on iznosi 0,17 kgm², a za drugi 0,35 kgm². Preporučeni odnos momenta inercije opterećenja prema momentu inercije motora u oba slučaja iznosi 50 ili manje. Lako je izračunati da je za manji motor maksimalni moment inercije opterećenja 8,5 kgm², a za veći motor – 17,5 kgm². Otuda potreba za većim motorom u drugom slučaju, kao i zajednička potreba za motorima sa tako velikim obrtnim momentom (nominalni obrtni moment i moment inercije rastu sa povećanjem snage motora).
Dakle, započeli smo sa studijom slučaja koja dokazuje da, ukoliko želimo pravilno da odaberemo pogon za aplikaciju, uvek moramo uzeti u obzir moment inercije – i motora i opterećenja.
Preporučeni odnos momenta inercije opterećenja prema momentu inercije motora
Svaki odgovorni proizvođač servo pogona daje vrednost odnosa neuravnoteženosti (ili parametra lambda, jer su to nazivi koji se koriste naizmenično) za informaciju kupca.
Zašto je to važno? Zato što će, ako se prekorače preporučene vrednosti, biti nemoguće pravilno podešavanje servo pogona.
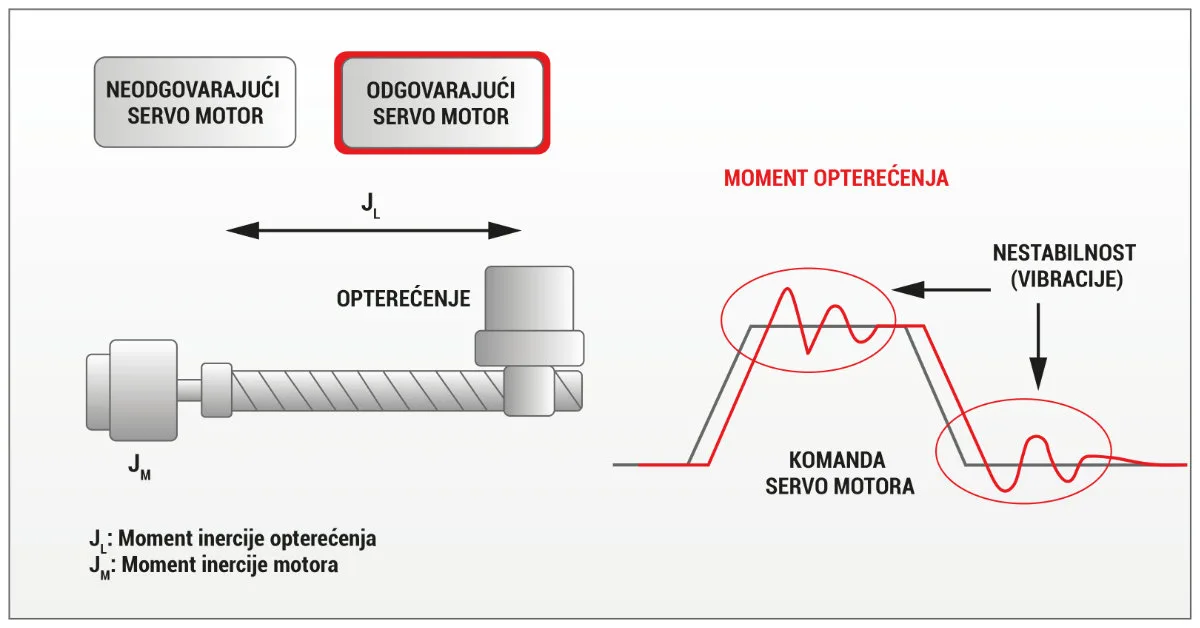
Pogledajmo sliku pored i analizirajmo odgovore sistema u zavisnosti od vrednosti odnosa neuravnoteženosti.
Lako je primetiti da zbog prevelike inercije opterećenja kontrolna petlja nije u stanju da pravilno upravlja položajem osovine motora – što dovodi do nestabilnosti (vibracija) momenta prenapona (razlike između zadate i postignute vrednosti) položaja.
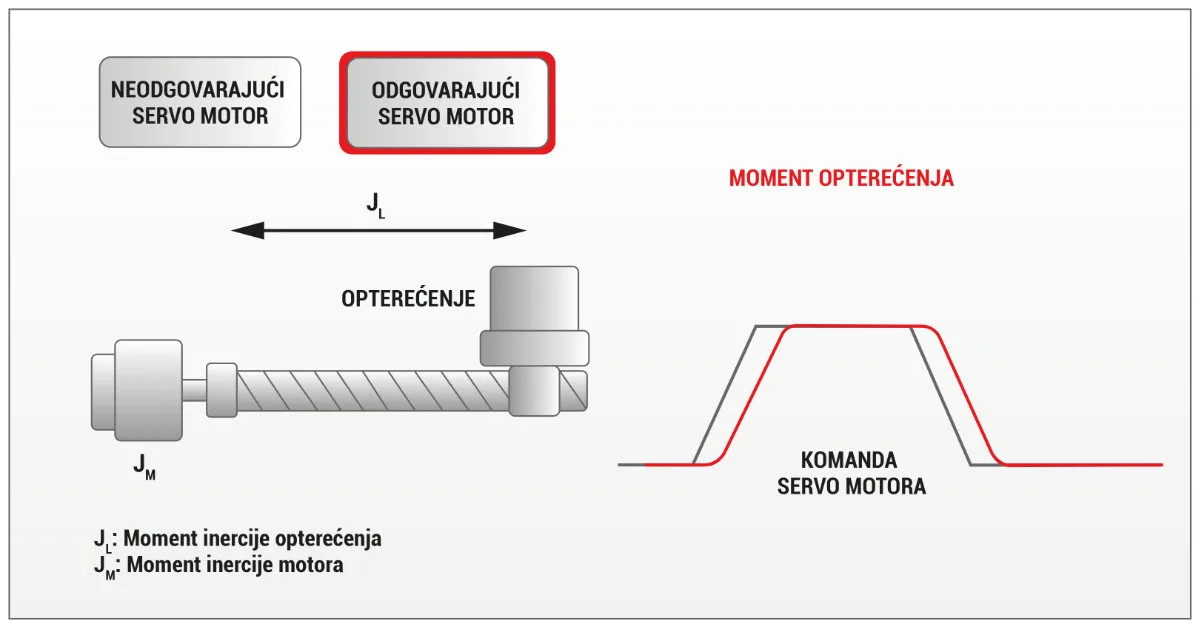
U slučaju održavanja odgovarajuće vrednosti parametra lambda, odgovor će biti sličan onom sa slike pored.
Naravno, ova vrednost se primenjuje u slučaju upravljanja položajem ili momentom (što je većina primena servo pogona). U režimu brzine nije potrebno obraćati pažnju na preporučeni odnos inercije, već samo na potrebni obrtni moment. Dakle, na primer, u aplikaciji odmotavanja, gde konstantnom brzinom odmotavamo kalem materijala, a do same brzine dolazimo bilo kojom dugom rampom ubrzanja, gornja razmatranja neće biti tačna. To možemo uporediti sa linearnim kretanjem, na primer, lansiranjem svemirske rakete.
I brzina svemira (brzina pri kojoj je moguće slobodno orbitiranje tela oko Zemlje) iznosi 7,91 km/s. To znači da astronauti na Međunarodnoj svemirskoj stanici kruže oko naše planete približno brzinom od 28.476 km/h! Kako to mogu izdržati? Zato što stanica ne menja naglo svoju brzinu, a samim tim na astronaute ne deluje preveliko ubrzanje koje bi moglo ugroziti njihov život. Iz perspektive astronauta ništa se ne menja, on ostaje na mestu (ovo pravilo važi i na Zemlji, čija brzina na ekvatoru iznosi oko 1670 km/h). Tokom lansiranja svemirske rakete, čiji je zadatak da posadu odvede na stanicu, dovoljno je ne prekoračiti granične vrednosti ubrzanja za ljudski organizam i polako dostići ciljnu brzinu. Na isti način, u režimu brzine, izbeći ćemo eventualne probleme sa podešavanjem pogona uprkos značajnom prekoračenju odnosa neuravnoteženosti.
Kako smanjiti vrednosti momenta inercije opterećenja na osovini motora?
S obzirom na to da znamo da u slučaju pozicioniranja ne možemo „pobeći“ od inercije, kako odabrati pogon za aplikacije koje karakterišu veoma visoki momenti inercije? Ne moramo valjda svaki put birati motore od nekoliko desetina kilovata?
Na sreću, ista fizika koja je uzrokovala ovaj problem može pomoći da se reši.
Mehanički reduktori
Mehanički reduktor je mehanizam konstruisan za promenu brzine obrtanja i obrtnog momenta između dva ili više rotirajućih elemenata mašine.
U najjednostavnijem objašnjenju, reduktor ima zadatak:
- Promenu brzine obrtanja (smanjenje ili povećanje brzine u zavisnosti od tipa konstrukcije)
- Promenu obrtnog momenta (povećanje ili smanjenje momenta u zavisnosti od konstrukcije)
Većina ljudi bi ovde završila listu „Za šta koristimo mehaničke reduktore?“. Neki konstruktori bi možda dodali korišćenje kao vrstu spojnice (zbog aksijalnih i radijalnih sila). Samo mali broj stručnjaka zna dodatnu osobinu mehaničkih reduktora:
- Promena momenta inercije (smanjenje ili povećanje momenta inercije redukovanog na osovinu motora)
U slučaju servo pogona korišćenih u industriji, većina primena se svodi na korišćenje redukcionog prenosnika, koji smanjenjem ulazne brzine na svom izlazu povećava obrtni moment. U ovom slučaju, smanjuje se i moment inercije redukovan na osovinu motora. Ovo se može predstaviti jednostavnom formulom IL=II/i2 gdje je:
- IL – moment inercije opterećenja (moment inercije na izlaznoj osovini mehaničkog prenosnika),
- II – moment inercije redukovan na osovinu motora spojenog sa prenosnikom,
- i – prenosni odnos prenosnika
Iz njega direktno proizlazi da se sa povećanjem prenosnog odnosa prenosnika moment inercije na osovini motora smanjuje kvadratom tog prenosnog odnosa.
Vratimo se na prvi primer i pokušajmo primeniti mehanički prenosnik sa prenosnim odnosom 1:100.
Opterećenje stola je ravnomerno raspoređeno na radijusu R2 = 250 mm. Radni ciklus – ¼ obrtaja za 2 sekunde sa rampom od 0,5 sekundi. Izračunati potrebni obrtni moment – 14 Nm. Izračunati moment inercije opterećenja nakon redukcije na osovinu reduktora – 9,40 kgm².
Nakon primene reduktora:
- Obrtni moment koji motor mora generisati = 14/100 = 0,14 Nm
- Maksimalna brzina motora = 10 * 100 = 1000 rpm
- Moment inercije redukovan na osovinu motora = 9,40/100*100 = 0,00094 kgm² = 9,40 kgcm²
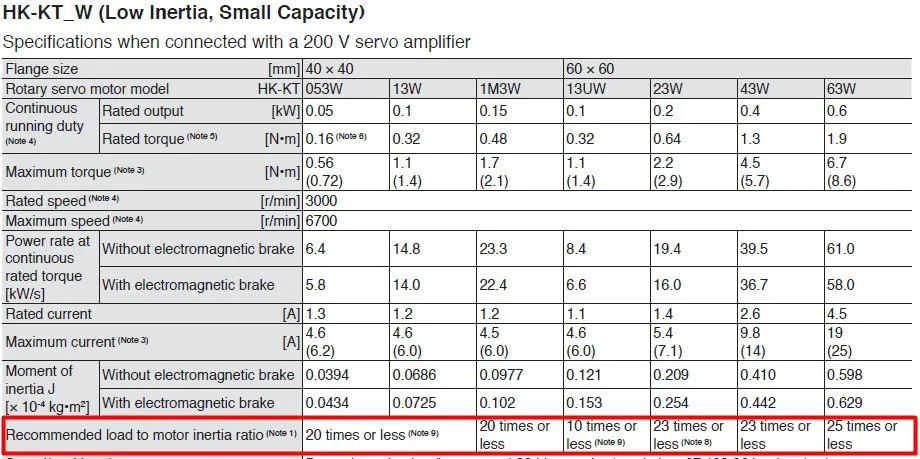
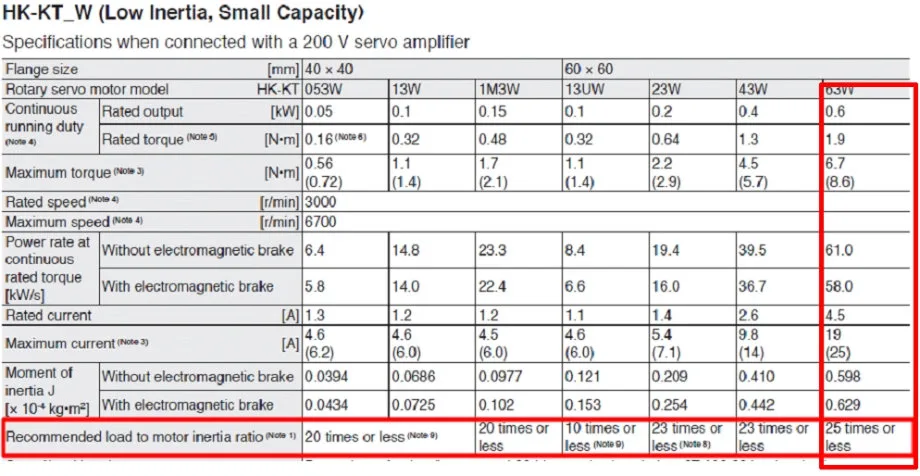
Efekat? Pre primene reduktora morali smo koristiti veliki i skupi motor tipa Direct Drive. Sa reduktorom odgovarajućeg prenosnog odnosa dovoljan nam je motor od 600W sa prirubnicom 60×60 kao što je HK-KT63W.
Naravno, ovo su samo teorijski proračuni – trebalo bi uzeti u obzir parametre kao što su moment inercije samog reduktora ili njegov startni moment, ali to su konstrukcijske karakteristike koje zavise od konkretnog tipa reduktora i njegovog proizvođača. Uglavnom, (pod pretpostavkom visokog preporučenog odnosa inercije) za planetarne reduktore ove vrednosti nisu toliko visoke da bi značajno promenile izbor, kao što je slučaj sa ovim motorom.
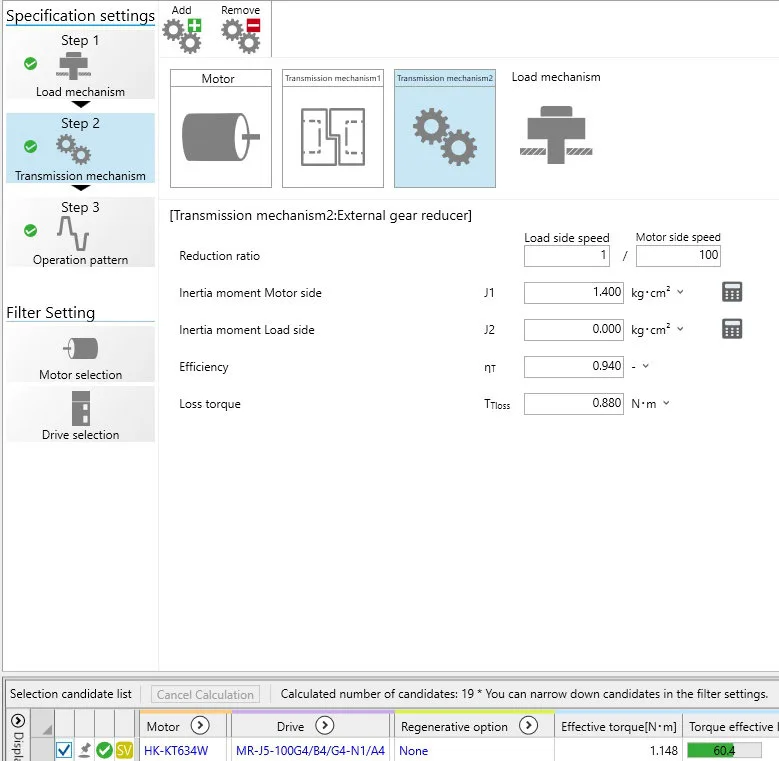
Jednostavan način za proračun je korišćenje besplatnog softvera za izbor servo pogona od Mitsubishi Electric – Motorizer.
Rezime
Pri izboru motora servo pogona treba se fokusirati na nekoliko važnih aspekata. Jedno od ključnih pitanja, često zanemareno, je odnos momenta inercije opterećenja prema momentu inercije rotora motora.
- Svaki servo pogon karakteriše se maksimalnim odnosom momenta inercije opterećenja prema momentu inercije rotora motora. Prekoračenje ovog odnosa može negativno uticati na upravljanje pogonom i u ekstremnim slučajevima onemogućiti njegovu primenu u aplikaciji (nedovoljna dimenzija).
- Zato uvek treba odabrati odgovarajuću klasu inercije motora (ultra low, low, medium) za konkretnu aplikaciju.
- U situaciji kada nam je potreban rezervni prostor za brzinu u smanjenju momenta inercije opterećenja, korisni mogu biti mehanički prenosnici. Oni smanjuju inerciju opterećenja, prenoseći je na osovinu motora putem kvadrata prenosnog odnosa.
(1) U prvom slučaju odabran je motor tipa Direct Drive iz portfolija Mitsubishi Electric – TM-RFM040J10. U drugom, veći motor iz iste serije – TM-RFM120J10.
Potrebno vam je više informacija? Kontaktirajte nas.
Mitsubishi Electric Europe B.V. (doo)
Branko Radenković
M: +381 62 661 699
e-mail: Branko.Radenkovic@mpl.mee.com