2D Grasping Kit omogućava kompanijama da lako automatizuju svoje zadatke hvatanja i sortiranja. Za podešavanje, podučavanje i rad nije potrebno kvalifikovano osoblje zahvaljujući oflajn podršci AI i jednostavnom korisničkom interfejsu.
Sve proizvodne kompanije se suočavaju sa istim izazovom: Kako mogu održati ili čak proširiti isplativu i efikasnu proizvodnju sa istim brojem zaposlenih? Nedostatak osoblja je postao norma u svim industrijama. Zbog toga kompanije žele da automatizuju sve više i više proizvodnih koraka, posebno fizički zahtevnih ili monotonih zadataka za koje se može naći sve manje zaposlenih.

Na sreću, napredak u robotici, veštačkoj inteligenciji i sistemima za hvatanje nastavlja da omogućava nove, isplative aplikacije za rešenja za automatizaciju. U prošlosti, preduzeća su obično imala dovoljno kvalifikovanog osoblja za instaliranje i rad sistema automatizacije. Kao rezultat toga, sistemi su dobijali sve više funkcija, ali su postajali i teži za rad. Danas to predstavlja probleme posebno za mala i srednja preduzeća. Oni se bore sa nedostatkom osoblja koji ih sprečava da automatizuju svoju proizvodnju i time je obezbede u budućnosti. Konkretno, kompanije se suočavaju sa značajnim izazovom kada je u pitanju rukovanje komponentama pomoću robota. Kada je sistem kamera neophodan za postizanje preciznog pozicioniranja za hvatanje komponenti, mnoge kompanije nailaze na ograničenja i moraju se osloniti na spoljne dobavljače usluga za automatizaciju, postajući zavisne od njih.

Lak početak automatizacije
Stoga je SCHUNK predstavio 2D Grasping-Kit, komplet aplikacija koji omogućava brzu, ekonomičnu i jednostavnu automatizaciju zahvaljujući veštačkoj inteligenciji koju je razvio SCHUNK u Nemačkoj. Komplet se sastoji od kamere sa objektivom, industrijskog računara, SCHUNK AI softvera i potrebnih kablova. Sve komponente su međusobno usklađene i, zahvaljujući otvorenom TCP/IP interfejsu, mogu se kombinovati sa bilo kojim robotom ili čak sa kontrolerom višeg nivoa (kao što je Siemens PLC). Omogućava rukovanje i sortiranje različitih komponenti nasumično raspoređenih u ravni. Konačno imamo rešenje za one vrste zadataka koje su bile složene za automatizaciju, ali monotone i neprivlačne za ljudske radnike.

Na primer, kada okrenuti delovi izađu iz mašine u kompaniji za proizvodnju, obično padaju u kutiju. Zaposleni ih zatim ručno sortira i stavlja u tacne na ispravan položaj tako da se sledeći koraci obrade mogu lakše automatizovati. Međutim, u ovom procesu je lako da se komponente oštete ili pomešaju. Kada robot preuzme posao, zaposleni se oslobađa ovih zadataka. U isto vreme, složenost i podložnost greškama se smanjuju u kasnijim automatizovanim procesima.
SCHUNK koristi 2D Grasping Kit i u sopstvenoj proizvodnji u Nemačkoj. Kupci imaju priliku da validiraju sopstvene aplikacije u CoLab centru za aplikacije robota i lako saznaju kako sistem može da unapredi njihovu proizvodnju.
Složen zadatak čini jednostavnim: sortiranje komponenti u providne vreće
Ako je sistem mehanički strukturiran, prosečnom korisniku bi trebalo samo manje od pola dana da nauči (nove) komponente sistema. Veb interfejs softvera vodi korisnika korak po korak do rezultata.
Korak 1: Fotografisanje komponenti
Kamera gleda odozgo na transportnu traku, poslužavnik ili sto za razmeštanje. AI softver prepoznaje i razlikuje komponente na osnovu prethodno naučenih slika i daje optimalnu poziciju hvatanja. Da bi to uradila, kamera prvo snima pozadinu na kojoj će biti postavljene komponente. Zatim je potrebno nekoliko fotografija delova koje treba uhvatiti. Na primer, ako je zadatak robota da uhvati komponente zajedno sa providnom ambalažom (kao što su šrafovi i navrtke u plastičnoj kesi) za ispunjenje narudžbine, operater jednostavno snima više fotografija komponenti na različitim pozicijama.
Osvetljenje je često potcenjen izazov za sisteme automatizacije zasnovane na korišćenju kamere. U zavisnosti od mesta ugradnje, može se izabrati odgovarajuća ekspozicija, posebno zato što se mora uzeti u obzir niz različitih parametara (kao što su veličina, rastojanje, talasna dužina ili otežan ugao snopa). 2D Grasping Kit ne zahteva namenski izvor osvetljenja i, zahvaljujući softveru koji pokreće AI, značajno je otporniji na ambijentalno svetlo od konvencionalnih sistema za vid. Kamera je dizajnirana da podnese različite uslove osvetljenja, uključujući promene dnevnog svetla na osnovu položaja Sunca, a takođe je sposobna da se prilagodi različitim pozadinama. Boja i refleksivnost površine takođe imaju minimalan uticaj. Sistem pouzdano detektuje metalne komponente čak i na svetloj pozadini.
Korak 2: Definišite objekte i tačke hvatanja
U sledećem koraku, operater jednostavno obeležava i imenuje komponente. SCHUNK AI softver automatski izdvaja konturu objekta iz pozadine, izoluje ga i izračunava varijanse za uglove gledanja, uslove osvetljenja i druge parametre. Nakon samo 10 do 20 slika, softver već ima dovoljan skup podataka o objektima koje treba detektovati.
Korak 3: Obučite AI i počnite
Kada se završe prva dva koraka, AI se trenira potpuno van mreže. Klijent zadržava punu kontrolu nad podacima u svakom trenutku jer oni ostaju u potpunosti unutar mreže njihove kompanije. Obuka traje samo jedan do dva sata. Tada je 2D komplet za hvatanje spreman za rad.
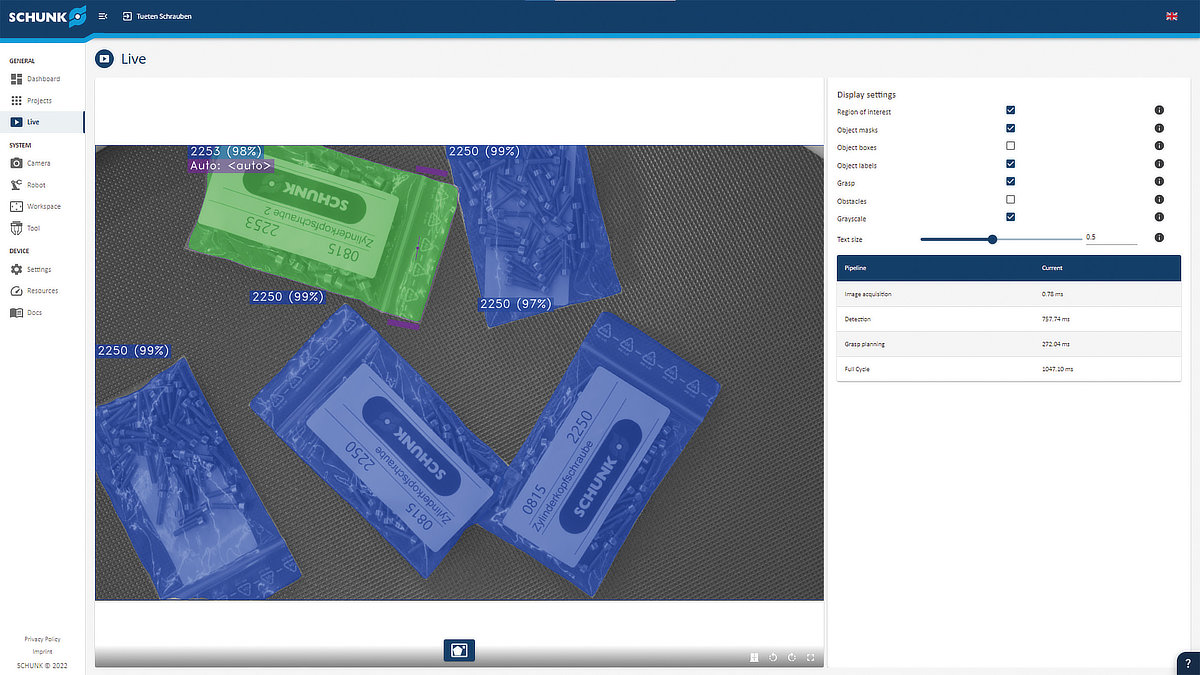
Kamera uz pomoć veštačke inteligencije sada prepoznaje komponente u torbama na osnovu karakterističnih karakteristika kao što su oblik, veličina i boja. AI prilagođava i kompenzuje sve varijacije koje se mogu pojaviti, kao što su refleksije ili deformacije vreća. Softver za obradu slike tada komunicira sa robotom i govori mu koje komponente prepoznaje, gde su pozicionirane, koliko daleko sistem za hvatanje treba da se otvori (u slučaju paralelnih hvataljki) i pod kojim uglom rotacije može najbolje da uhvati komponente . Robot zatim pomera svoj hvatač do komponente, podiže je i postavlja u ispravan položaj na unapred definisanu lokaciju. Tokom procesa hvatanja i pomeranja, kamera istovremeno detektuje sledeći objekat i izračunava njegov tip i tačku hvatanja. Ovo traje oko dve sekunde, omogućavajući robotu da odmah uhvati drugi predmet nakon što je spustio prvi.
Ono što ovaj sistem izdvaja je to što ne samo da detektuje objekte, već i automatski izračunava tačke hvatanja za specifičnu hvataljku koja se koristi. Pored toga, on prenosi parametre, kao što su ugao rotacije i širina otvaranja, na sistem kontrole robota. Po želji, korisnici mogu vrlo lako ručno da memorišu više tačaka hvatanja. U ovom primeru, 2D Grasping Kit radi sa univerzalnom hvataljkom EGK. U budućnosti, komplet će raditi i sa pneumatskim i mehatroničkim paralelnim hvataljkama, kao i magnetnim, vakuumskim i lepljivim hvataljkama.
Rezime
2D Grasping Kit omogućava mnogim kompanijama da lako počnu sa automatizacijom:
- Zahvaljujući veb interfejsu prilagođenom korisniku, nastavni proces može uspešno da završi u roku od pola dana, čak i od strane neobučenog osoblja.
- Čak i teške komponente (kao što su fleksibilne ili one sa visokom refleksijom) mogu se naučiti veoma lako i pouzdano zahvaljujući AI.
- SCHUNK AI softver ne samo da omogućava aplikacije, on takođe osigurava da je sistem lak za korišćenje i da radi nesmetano u pozadini.
Zahvaljujući ovom softveru, mnogi proizvodni koraci, posebno monotoni zadaci sortiranja na proizvodnim mašinama ili na interfejsu sa logistikom (preuzimanje porudžbina), konačno mogu biti automatizovani pouzdano i uz minimalan napor.