

Ruka je najkorišćeniji ljudski alat. Njena spretnost, fine motoričke sposobnosti i senzorna povratna sprega čine je sponom između tela i okoline. Reprodukcija ove fascinantne funkcionalnosti u veštačkoj ruci jedan je od najvećih izazova u robotici, a istovremeno i jedan od njenih najtežih zadataka. Bilo da je u pitanju automatizacija ili medicinska robotika, industrijske primene ili moderna proteza – od robotskih ruku se očekuje da rade ono što je ljudska ruka usavršavala hiljadama godina: koordiniraju složene pokrete, koriste različite tehnike hvatanja, reaguju na spoljašnje stimuluse i precizno koriste silu. Nije stvar samo u obliku i mobilnosti, već i u minijaturnim motorima, inteligentnoj kontroli i sposobnosti prilagođavanja promenljivim uslovima okoline.
Ljudska ruka je veoma složena i fino podešena integracija 27 kostiju, preko 30 zglobova i mišića, kao i brojnih tetiva kako bi se postigla maksimalna fleksibilnost i kontrola. Za veštačku ruku, to znači da mora biti dizajnirana da bude robusna i fleksibilna, lagana i stabilna, kao i kompaktna i efikasna. To je balansiranje koje postavlja visoke zahteve na materijale, dizajn i, što je najvažnije, na tehnologiju pogona! Električni motori obezbeđuju snažne pokrete, senzori pružaju neophodne povratne informacije, a inteligentni sistemi upravljanja koordiniraju procese u realnom vremenu. Ukratko, da bi se robotska ruka kretala što je moguće sličnije ljudskom, potrebne su joj precizne i fino podešene unutrašnje komponente. Cilj je stvoriti simbiozu tehnologije i biologije – pomažući u obnavljanju izgubljenih sposobnosti ili proširivanju ljudskih kapaciteta. Prelaz između humanoidne robotike i moderne proteze je fluidan. Obe discipline koriste slične tehničke principe kako bi omogućile pokrete koji su što bliži ljudskom modelu.
Fina motorika
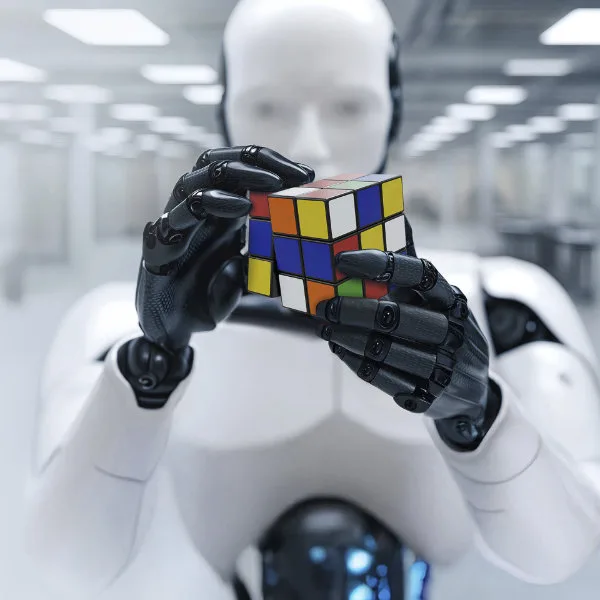
Humanoidni roboti čine prelaz između veštačke inteligencije i stvarnog, fizičkog sveta. Njihove ruke nisu samo alati već sredstva izražavanja i interakcije. Kvalitet sekvenci pokreta – koliko glatko, snažno ili precizno se izvršavaju – u velikoj meri zavisi od osnovne tehnologije pogona. Minijaturizacija, preciznost, dinamika i energetska efikasnost nisu samo popularne reči, već ključni faktori uspeha. Samo kada ovi elementi savršeno interaguju moguće je učiniti da pokreti izgledaju tako prirodno da je razlika između čoveka i robota jedva primetna. Visoka energetska efikasnost igra posebno važnu ulogu, jer su prostor i izvori energije ograničeni, a pogon i dalje mora pouzdano da funkcioniše.

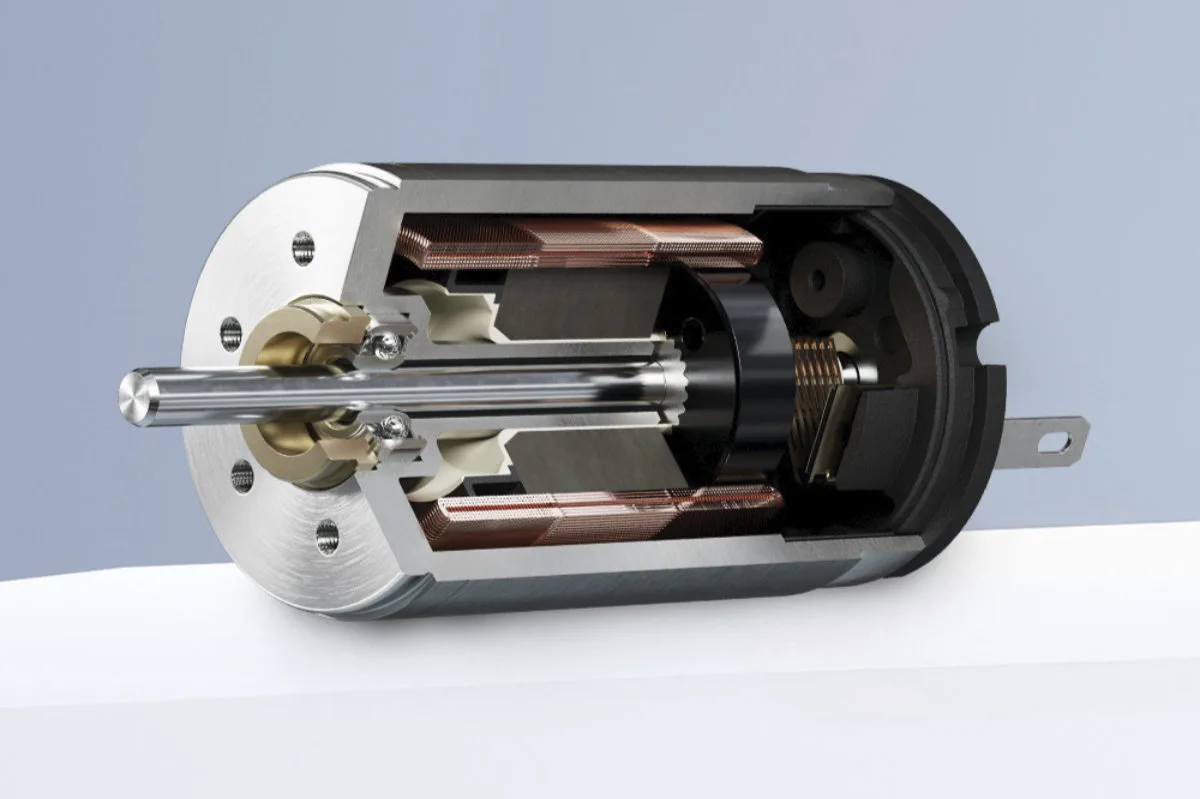
Da bi se prsti robotske ili protetske ruke mogli pojedinačno pomerati, svaki prst pokreće jedan ili više aktuatora. Često se koristi više od 20 pogona po ruci kako bi se omogućile najsloženije sekvence kretanja. Podrazumeva se da pogoni, koji se obično sastoje od motora, enkodera, planetarnog reduktora, vretena i kontrolera, moraju biti izuzetno kompaktni. Samo na taj način prsti se mogu pojedinačno položajno rasporediti u različite obrasce hvatanja – od delikatnih pokreta do snažnih procesa hvatanja. Jednosmerni motori iz porodice FAULHABER SXR su građeni da budu pogodni za ovu zahtevnu primenu. Zahvaljujući svojoj inovativnoj geometriji namotavanja, visokoperformansnim magnetima od retkih zemalja i raznovrsnim mogućnostima kombinovanja visokopreciznih planetarnih reduktora, oni nude idealne uslove za upotrebu u veštačkim šakama.
Mnoštvo mogućnosti
Po rečima kompanje FAULHABER, iza njih su decenije iskustva u razvoju i proizvodnji visokopreciznih pogonskih sistema i poznaje posebne zahteve koje robotske ruke i moderne proteze postavljaju tehnologiji. Njihovi mikromotori se koriste širom sveta u vrhunskim medicinskim protezama, kao i u robotskim sistemima.
Napomena: Članak je prilagođenje teksta „Humanoid Robotics demands dexterity in motion“ za čitaoce magazina Mehatronika.
Više informacija: FAULHABER MINIMOTOR SA, Zona Artigianale 8, Madonna del Piano, 6980 Croglio, Tel.: +41 (0)91 611 31 00, info@faulhaber.ch, www.faulhaber.com



