

SunFounder PiDog kit
SunFounder PiDog kit baziran na Raspberry Pi platformi je veoma dobro STEM učilo namenjeno kursevima sa temom kretanja robota na četiri noge uz mogućnost samostalne orijentacije, daljinskog upravljanja i uz implementaciju osnovnih AI funkcija prepoznavanja objekta ili lica ugrađenom kamerom.
Pros
- Veliki broj servo motora sa metalnim zupčanicima omogućavaju dobru upravljivost i trajnost
- Odlično napisane biblioteke i aplikacija za mobilne telefone obezbeđuju potpunu softversku kontrolu
- Kompatibilnost sa Raspberry Pi Zero, 3, 4 i 5 modelima čine ga dostupnim velikom broju korisnika
Cons
- Nema ni jedan vid suspenzije te mu je kretanje grubo
- Zvučnik je jako loš i lavež zvuči veoma neuverljivo
- Šapice su uske i nestabilan je na neravnoj ili glatkoj površini
- Zamena SD kartice je teška i boljom konstrukcijom je mogla biti olakšana
SunFounder PiDog je STEM robot u kitu, koji svojim oblikom i funkcionalnošću oponaša psa. Smišljen je za napredne kurseve robotike u kojima se pokrivaju teme složenog kretanja na četiri noge i upotreba modernih senzorskih tehnologija kao što je određivanje pravca dolaska zvuka, ultrazvučno merenje udaljenosti predmeta i AI prepoznavanje lica na snimku kamere u realnom vremenu.
Robot dolazi nesastavljen u beloj kartonskoj kutiji sa fotografijom robota. Dizajn je nenametljiv, čist i nije uloženo puno truda u luksuz pakovanja. U kutiji su gusto složeni svi delovi robota, sortirani u kesicama. Kada jednom otvorite paket i izvadite njegov sadržaj, ne verujemo da ćete i pomisliti da delove ponovo složite nazad.
Make it easy, make it fun
Sastavljanje nije jednostavno, uprkos „Make it easy, make it fun“ Sunfounder paroli, ali je dobro dokumentovano kroz „korak po korak“ vodič koji ide uz sam kit. Uvek imate i pomoć na netu na sajtu pidog dokumentacije sa svim potrebnim dokumentima i uputstvima. Nama je bilo potrebno oko četiri časa za celo telo, ali smo imali par problema koji nisu bili pokriveni uputstvom. Razlog je jednostavan. Naš primerak PiDog-a smo dobili od kompanije SunFounder mnogo ranije, gotovo godinu dana pre nego što je zvanično izašao na tržište i učestvovali smo svojim korisničkim sugestijama na oblikovanje nekih njegovih karakteristika i savetovali smo neke ispravke u dokumentaciji. Iz tog razloga, nećemo detaljno opisivati štampano uputstvo i sve konstrukcione elemente kita koji je sada u prodaji, jer smo mi tada dobili „beta“ verziju, koja je imala par propusta i u uputstvu, ali i u odabiru elemenata. Kada kažemo propusta, mislimo na to da je jedna kesica sa zavrtnjima bila M1.4×6, a trebalo je da bude M1.4×4, a jedna kesica spojnica je bila sa R2655, a trebala je da u sebi ima R2653 spojnice. PiDog se mogao sasvim korektno sastaviti i sa tim delovima, u pitanju je samo estetika vezana za usaglašenost dubine navoja i dužine zavrtnja, ali nam je svako odstupanje od uputstva trošilo dodatno vreme. Sastavljen robot se može postaviti na akrilno postolje koje dolazi sa njim, a zgodno je i prilikom montaže, posebno pri kalibraciji motora.
Takođe, u doba našeg inicijalnog upoznavanja sa PiDog platformom, prateći softverski paket nije bio do kraja ispoliran i bile su potrebne određene modifikacije koda. Sada kada je izašla finalna verzija, isprobali smo od početka sve softverske pakete i instalaciju na sasvim drugom računaru i možemo ustvrditi da je kompletan postupak u finalnoj verziji kita automatizovan i bez propusta.
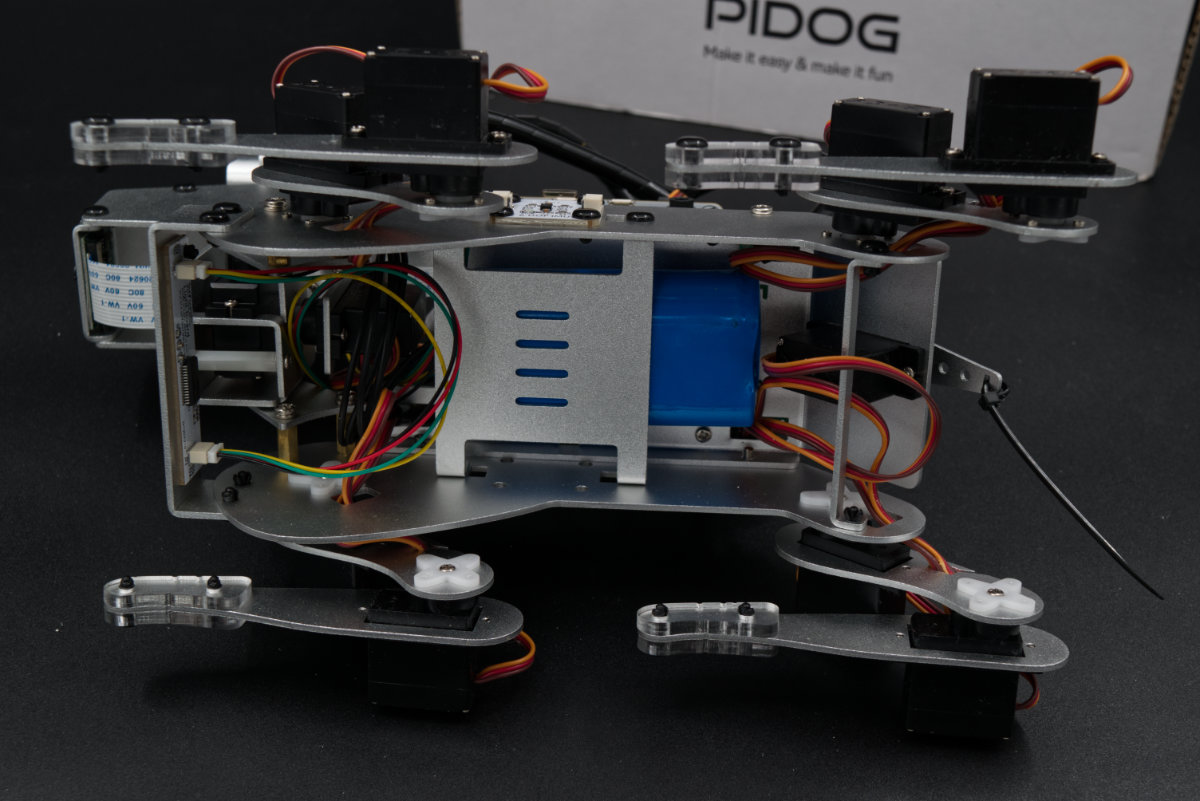
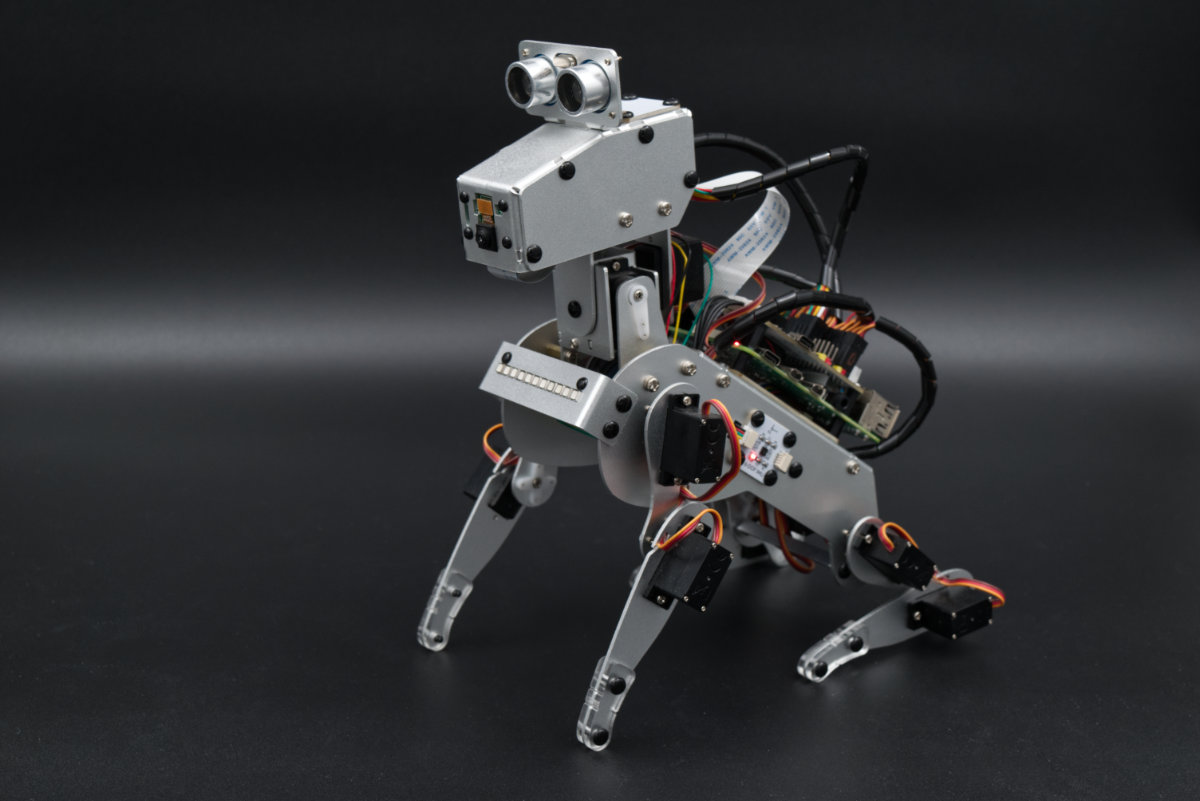
Telo PiDog-a
PiDog ima telo od aluminijumskih delova, uz par akrilnih dodataka. Akrilni su nosač i vrhovi nožica. U kitu se nalaze svi potrebni šrafovi, šrafciger i dodatni specijalni ključ za pritezanje matica. Tu su i različiti plastični i mesingani odstojnici.

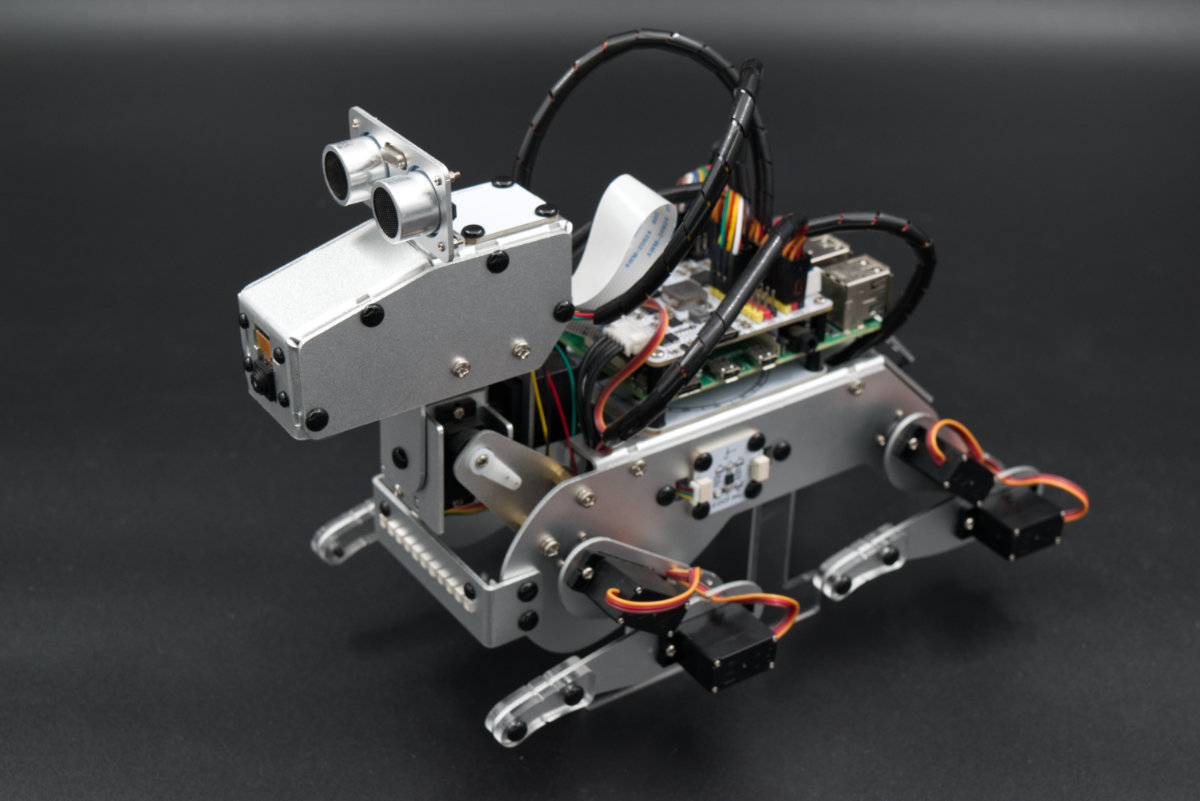
Kada se sastavi, telo je čvrsto i bez problema nosi svu potrebnu elektroniku, bateriju i motore. Izgledom podseća na psa igračku dužine 20 cm, sa visinom leđa od 15 cm. U svojoj konstrukciji nema ni jedan amortizacioni element, ni u vidu federa niti u vidu pneumatskog ili uljnog amortizera, te je kretanje oštro i bez mogućnosti ikakve suspenzije.
Senzorski moduli
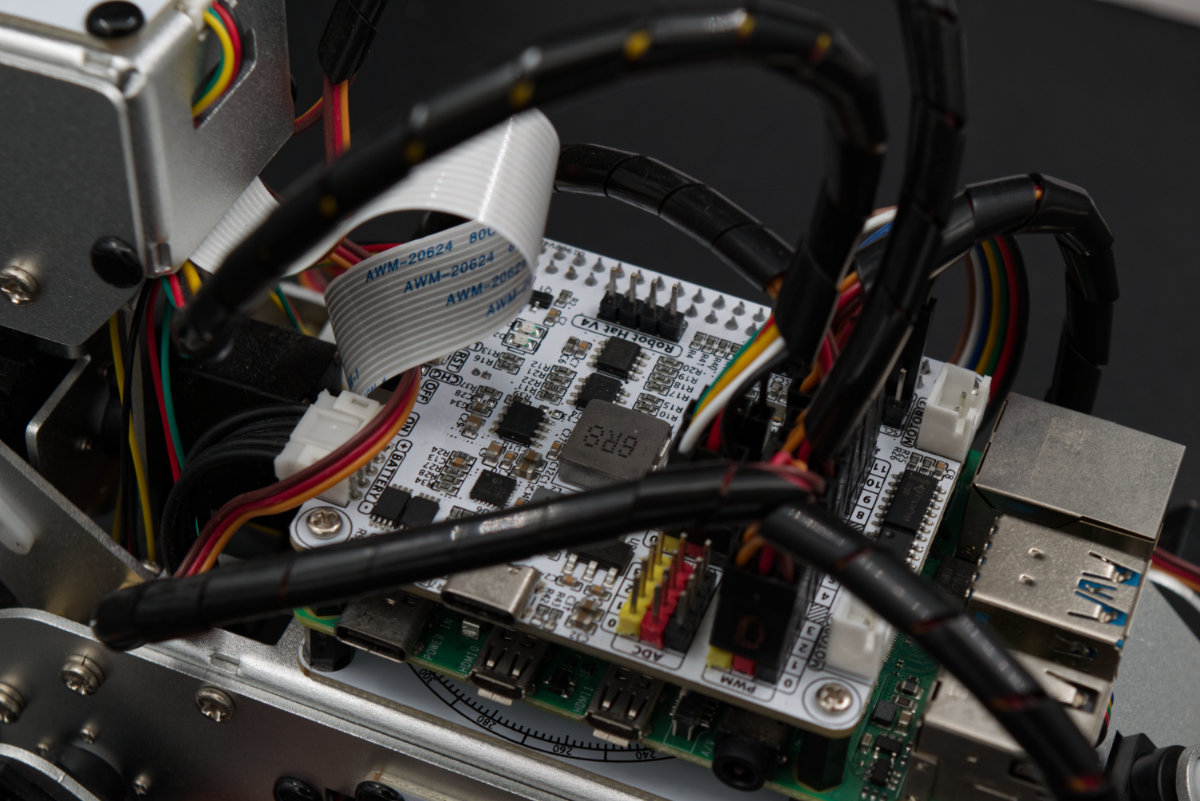
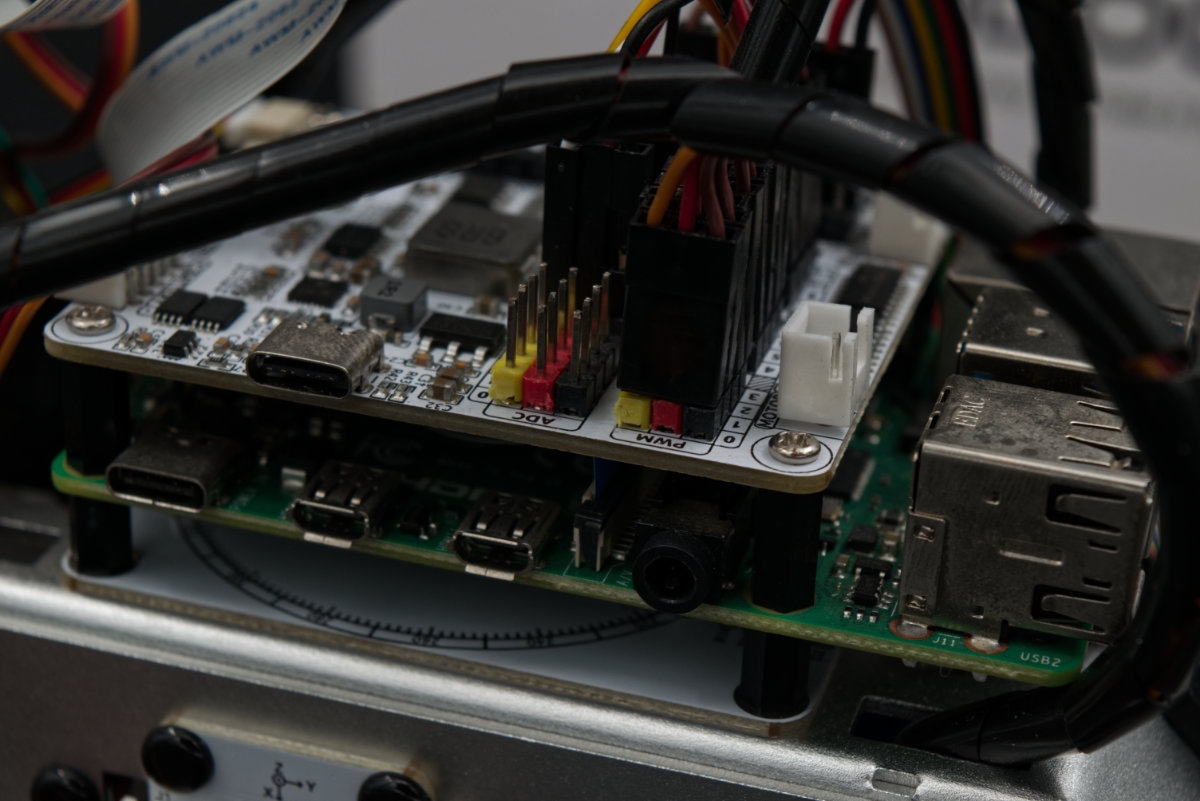
Osnovna elektronska ploča u kitu je SunFounder-ov Robot HAT koji se može nabaviti i odvojeno od ovog kita. To je multifunkcionalni modul na koju se povezuju motori i senzori. Samo ime govori da je ovo HAT, a pregledom se odmah da uočiti da je konstruisan da se može povezati na Raspberry Pi 4 model B GPIO konektor. Ovde bi skrenuli pažnju da je SunFounder na svom sajtu pomenuo da je moguće da robot radi i sa Raspberry Pi 5, Raspberry Pi 3 i 3+, kao i sa Raspberry Pi Zero 2W. Ova recenzija se bazira na Raspberry Pi 4 Model B SBC-u i sva dodatna uputstva, pojašnjenja i iskustva se odnose na tu platformu.
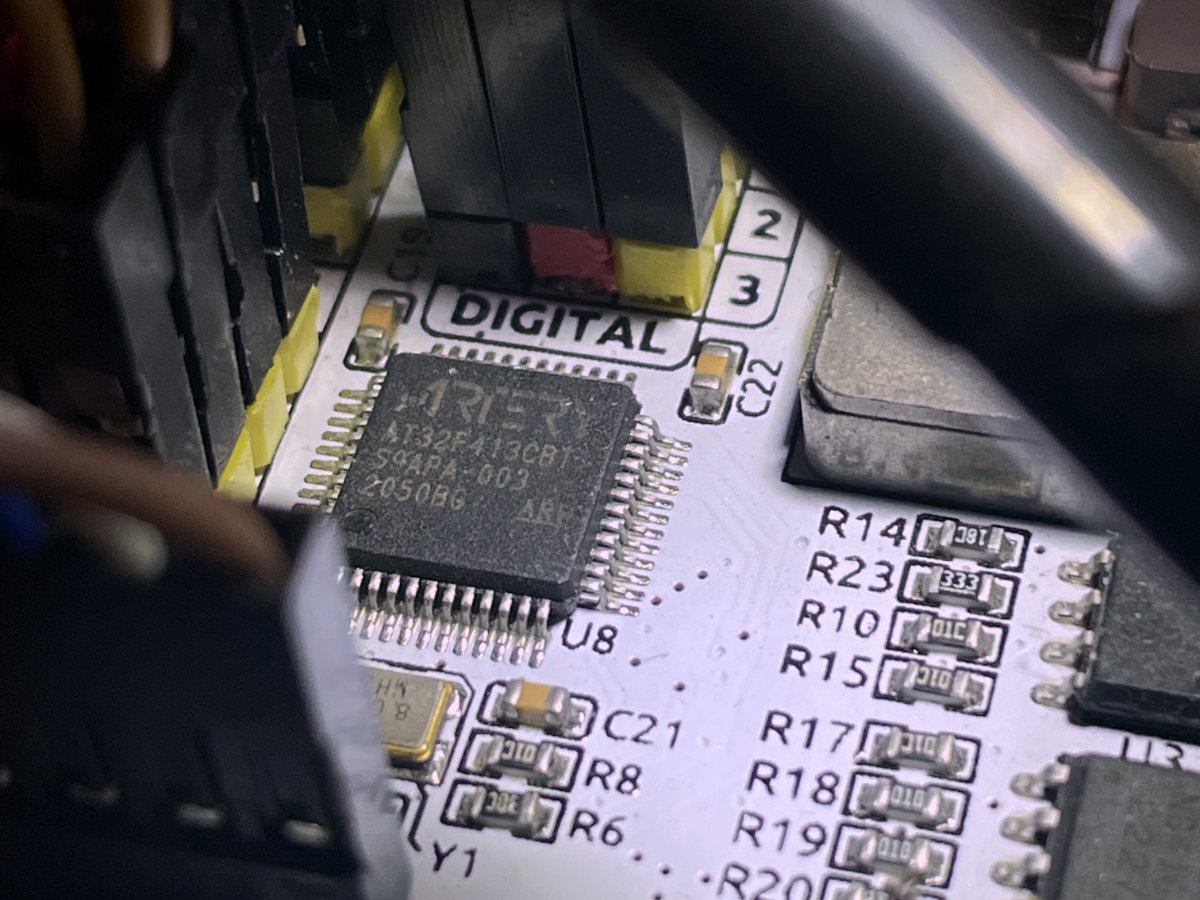
Artery AT32F413CBT7 mikrokontroler je na ovom HAT-u i upravlja njegovim radom. To je mikrokontroler sa ARM Cortex-M4F jezgrom koje radi na 200 MHz i ima 64 KB RAM-a i 128KB Flash memorije.
Na Robot HAT-u nalaze se dva JST XH2.54 porta za po jedan motor koji se kontrolišu preko MX1508S drajvera za koračne motore i u nekom drugom izvođenju može se priključiti na motore koji pogone točkove recimo i na taj način obezbeđuju kretanje robota.
Direktno sa Raspberry Pi GPIO konektora izvedeni su i I2C, SPI i UART portovi sa svim pinovima. Posebno su dati PWM kanali, svih 12 i uz svaki od njih dodat je jedan GND i jedan VCC pin. Na taj način je olakšano povezivanje servo motora, jer svakom od njih su potrebna sva tri signala. Slični tropinski hederi su dati i za četiri digitalna pina (D0-D3) i četiri analogna porta (A0-A3), dakle sam signalni pin i uz njega GND i VCC pin. Ovakva realizacija dodatnih hedera umnogome olakšava ožičavanje modela i čini ga urednim.
Li-ion 18650 baterija od 2200 mAh koja dolazi sa PiDog-om je fiksirana sa donje strane robota i dopunjuje se kroz USB-C port na Robot HAT-u. Punjenje je povereno boost punjač čipu IP 2326 proizvođača Injonic Technology. Na HAT-u se nalazi i indikator rada baterije i dve korisničke programabilne diode. Prekidač za uključivanje robota, dugme za reset i jedno korisničko programabilno dugme takođe su tu postavljenje. Trajanje rada baterija je od 90 do 120 minuta sa jednim punjenjem u zavisnosti od aktivnosti robota. Za dopunu prazne baterije je potrebno do tri sata.
Senzorski modul za detekciju pravca dolaska zvuka koji pokriva svih 360 stepeni je u kitu. Na njemu su tri mikrofona montirana na kružnici, sa istom dužinom kružnog luka između njih. Tritan Technology TR16F064B 16-bitni audio DSP obradom prikupljenih podataka sa mikrofonskih ulaza, lociran u centru modula šalje SPI kanalom Raspberry Pi-u ugaonu vrednost pravca dolaska zvuka i time omogućava da PiDog prati, udaljava se ili se na neki treći način ponaša u zavisnosti od pravca zvuka.
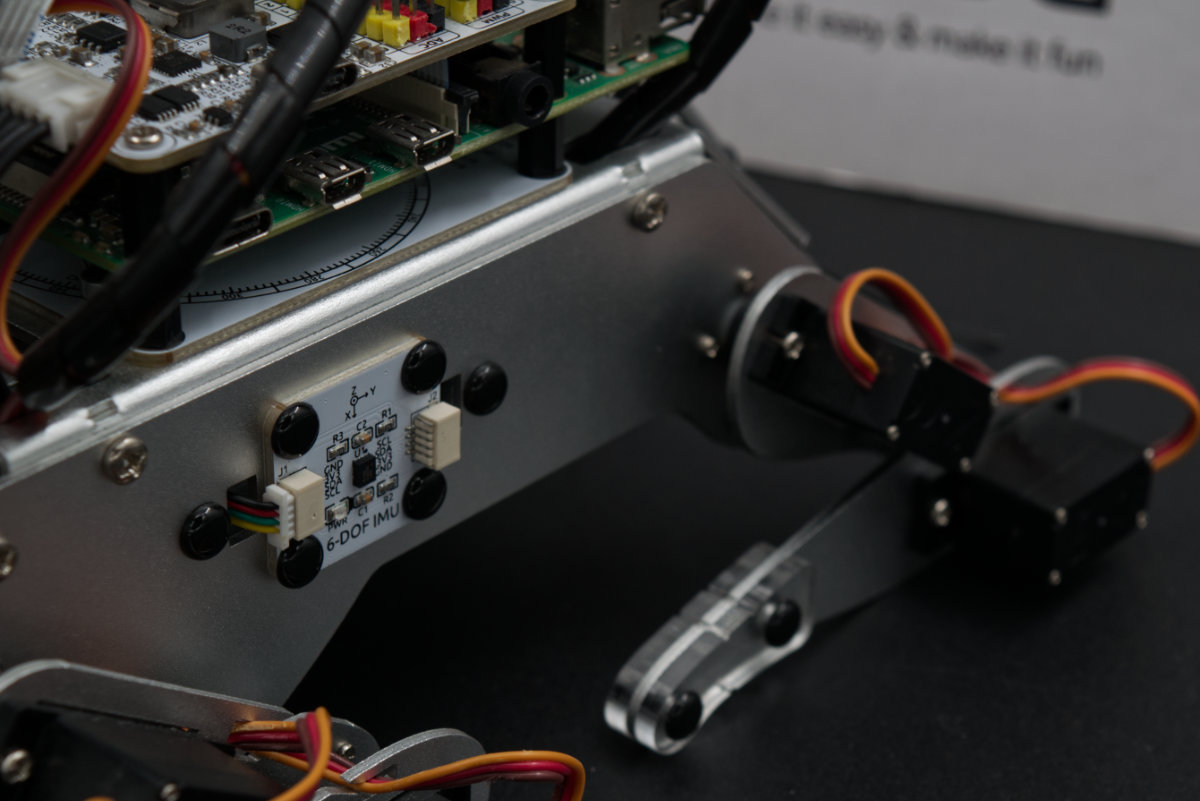
6-DOF IMU (inertial measurement unit) modul koji kombinuje troosni žoroskop i troosni akcelerometar. Baziran je na I2C MEMS senzoru SH3001 kompanije Deep Semiconductors, poznatom na kineskom tržištu po upotrebi u „consumer“ elektronici. U realnom vremenu može pratiti ugaonu brzinu i linearno ubrzanje objekta za koji je pričvršćen i merenja su mu potpuno nezavisna od temperature okoline u opsegu od -40°C to 85°C. Njegove specifikacije ćete teško pronaći na internetu, ali je dobro što je SunFounder u svojoj Python biblioteci integrisao komande za komunikaciju i čitanje stanja ovog senzora, te vam ni neće trebati. Generalno može služiti za detekciju nagiba, 6D orijentaciju, detekciju slobodnog pada, kao pedometar, za detekciju vibracije dvostrukog dodira, navigaciju u zatvorenom prostoru i slično. Montira se na jednu od bočnih strana tela PiDog-a. Osetljivost senzora je 262 LSB/°/s u opsegu ±125°/s, odnosno 16.4 LSB/°/s u opsegu ±2000°/s.
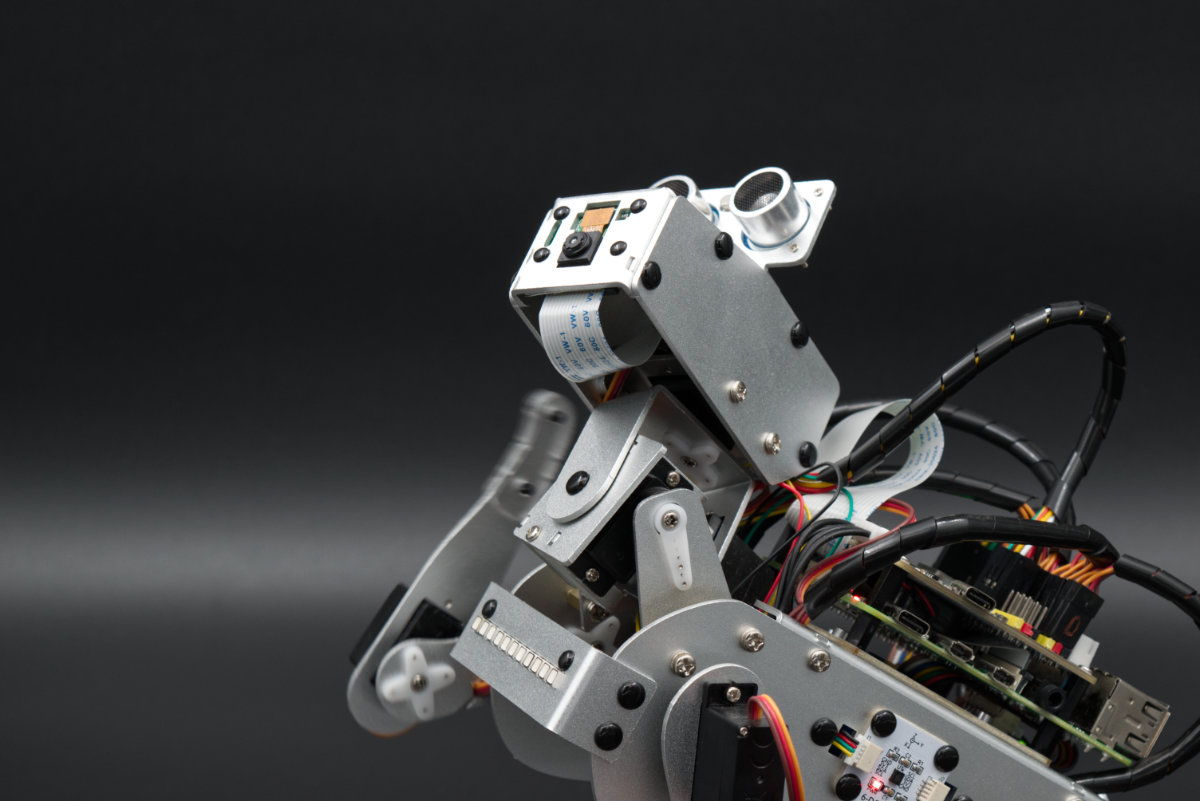
Modul sa dvokanalnim senzorom za dodir na temenu je glave robota. Koristi dva TTP223 kapacitivna senzora dodira. Jedan od primera upotebe je simulacija „češkanja“ PiDog-a po temenu.
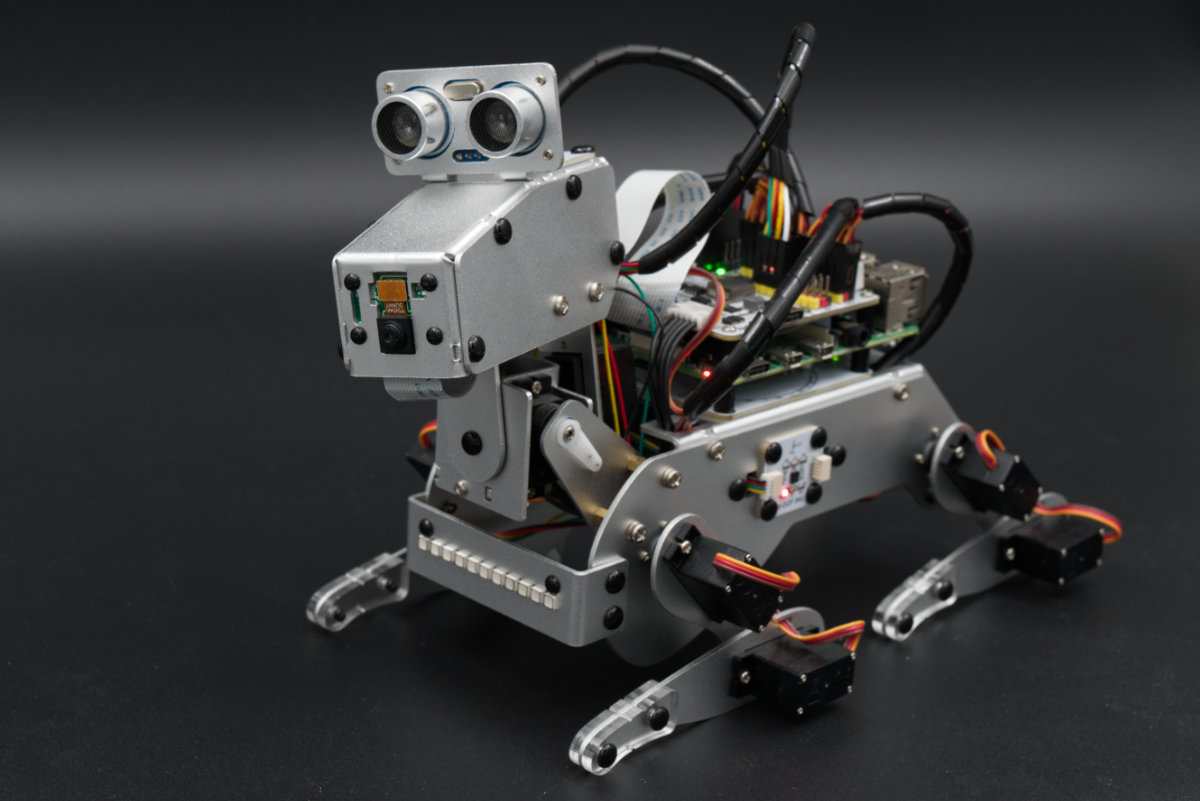
Ultrazvučni senzor HC-SR04 se takođe nalazi na glavi i umešno je montiran kao oči PiDog-a. Njegova očitavanja omogućavaju PiDog-u da „uoči“ prepreke pred sobom na razdaljini od 20 mm do 4000 mm sa tačnošću od 3 mm. Softver na osnovu očitanih vrednosti sa senzora može doneti odluku o daljem pravcu kretanja ili nekoj drugoj akciji.
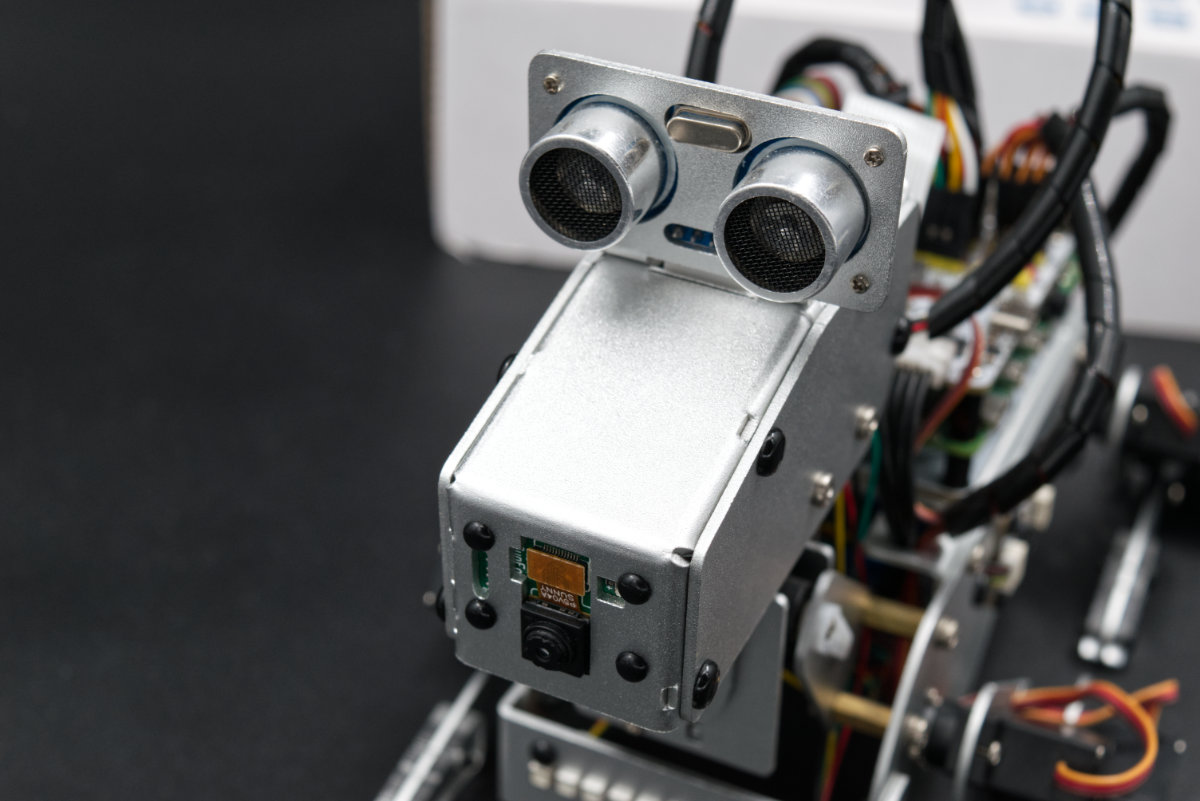
Kamera modul se nalazi u njušci. 5MP kamera maksimalne rezolucije snimljene slike 2592 x 1944 pixels, može snimati i video do 1080p30. Modul nema mikrofom i ne može beležiti zvuk. Težine je svega 3 g i svo vreme snima prostor ispred PiDog-a i tu sliku ili video je moguće poslati aplikacijom. Tako robot postaje „špijunski“ pas. Druga moguća primena je detekcija lica, što je takođe jedna od vežbi u ovom STEM paketu.
Elektronika PiDog robota
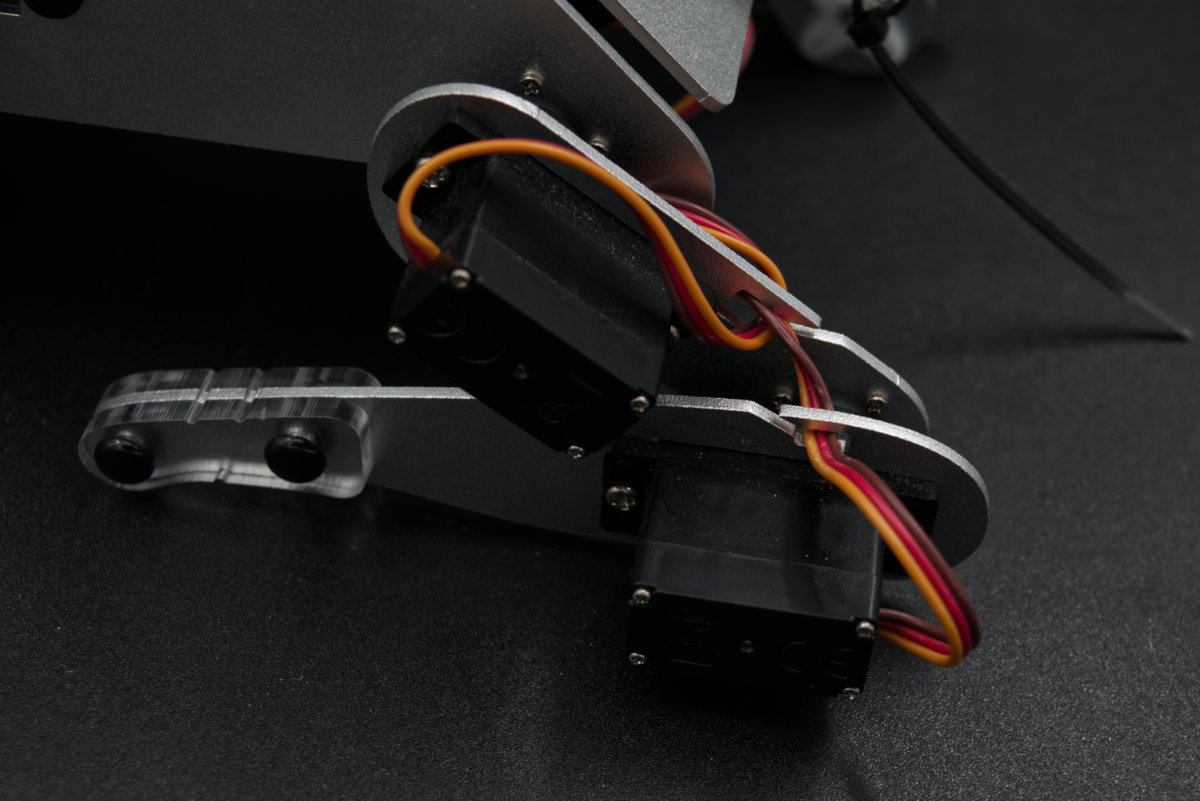
Da bi se pokretao, koristi četiri noge. Svaku od nogu pokreću dva servo motora. Dakle osam servo motora je za kretanje. Kako se u kitu se nalazi ukupno dvanaest motora, jasno je da imamo još četiri. Dodatna tri dobijamo za pokretanje vrata/glave tako da njušku PiDog-a možemo usmeriti kuda god poželimo. Najzad jedan motor je za mahanje repom. Svi motori su identični, u crnom plastičnom kućištu, a u kitu koji smo mi dobili došli su potpuno neoznačeni. Međutim, SunFounder koristi iste crne motore i na još nekim svojim modelima robota i oni nose oznaku SF006M. Nismo uspeli da nađemo informaciju o tehničkim specifikacijama ovih motora, jedino što znamo je da su ovo digitalni servo motori sa metalnim zupčanicima. No, sasvim su dovoljni za kretanje robota ove mase.
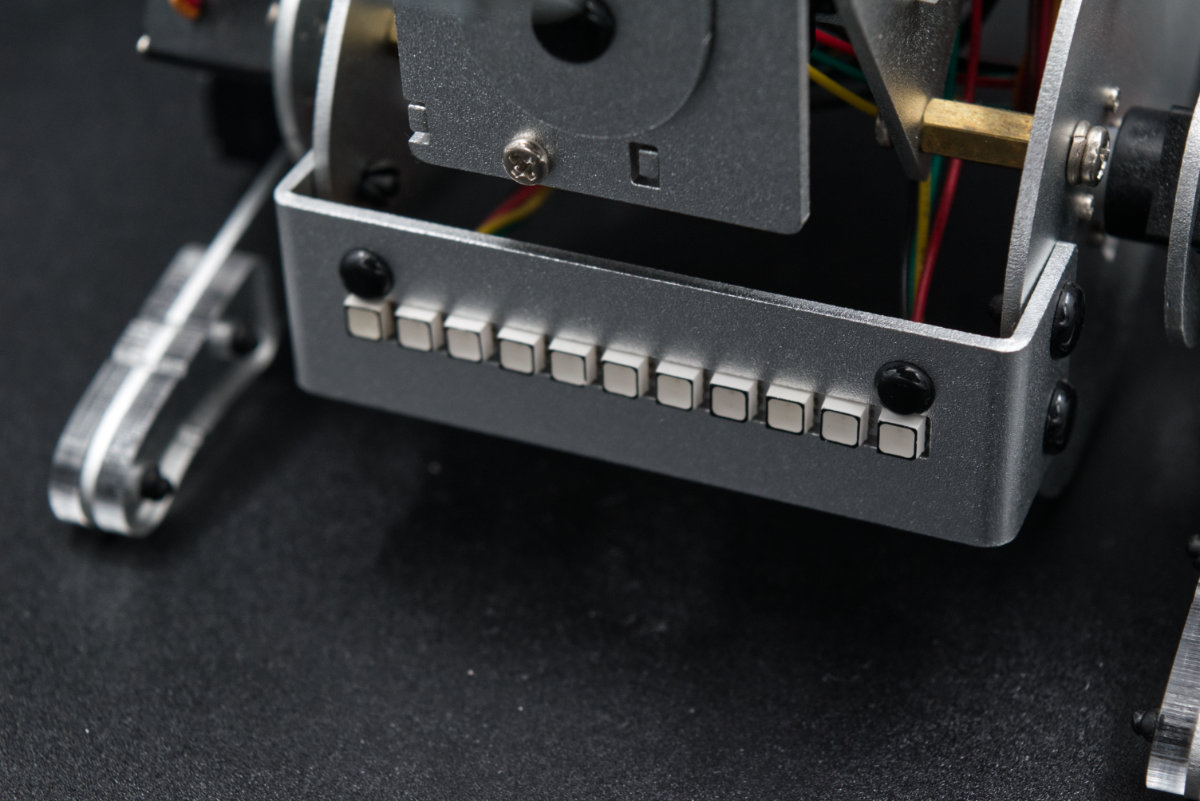
RGB ploča sa nizom od jedanaest NeoPixel Mini 3535 RGB dioda nalazi se na grudnom delu robota i koristi se za izražavanje emocija bojama i intenzitetom svetla koje emituju kontroliše se SLED1735 čipom. Sonix SLED1735 može kontrolisati do 256 LED dioda ili 75 RGB LED dioda i u 256 nivoa svetline, što niz čini potpuno programabilnim, sa potencijalnim mogućnostima nadogranje dodatnim LED matriksom.
Robot ima i jedan zvučnik, kojim može da laje. Youngfukang NS4168 2.5W mono class D audio pojačavač na HAT-u pojačava audio signal i odvodi ga na mali crni zvučnik sa donje strane HAT-a. Robot koristi generički plastični zvučnik kojeg smo sretali u mnogim mejkerskim kitovima i kvalitet je tek toliki da možemo razlikovati kada PiDog laje, a kada dahće.
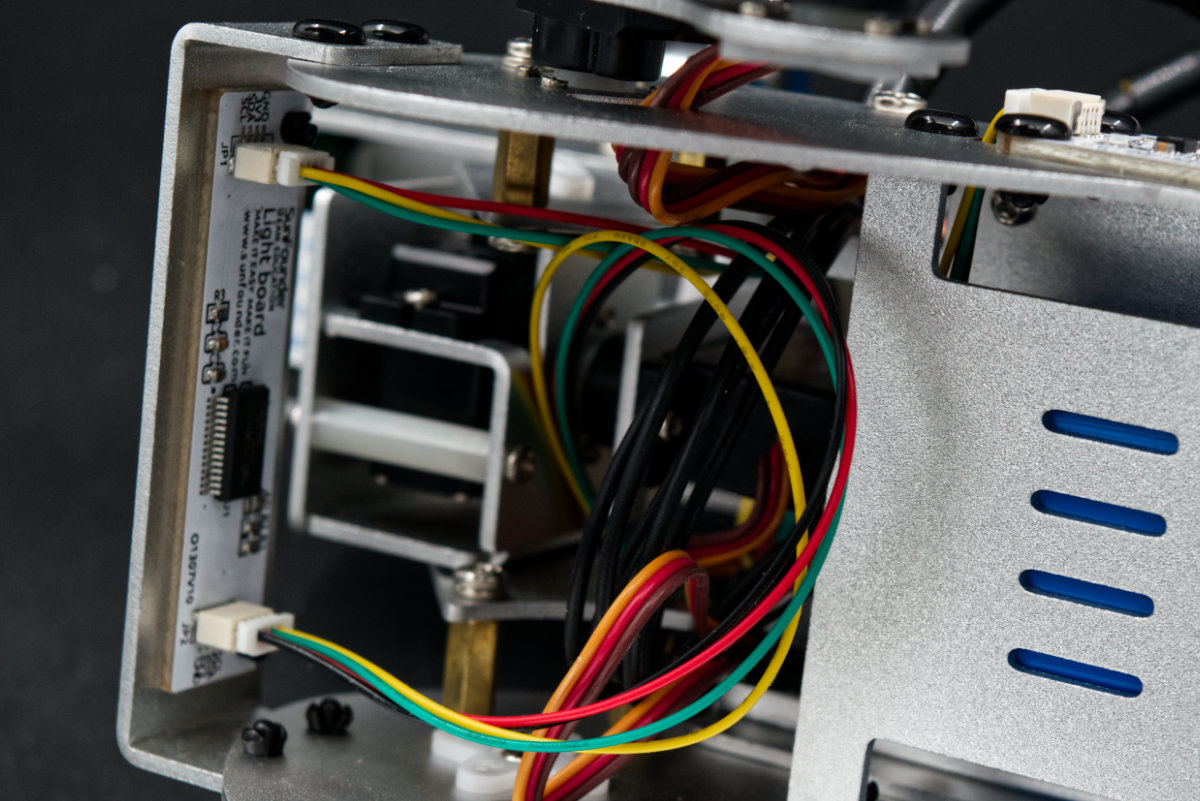
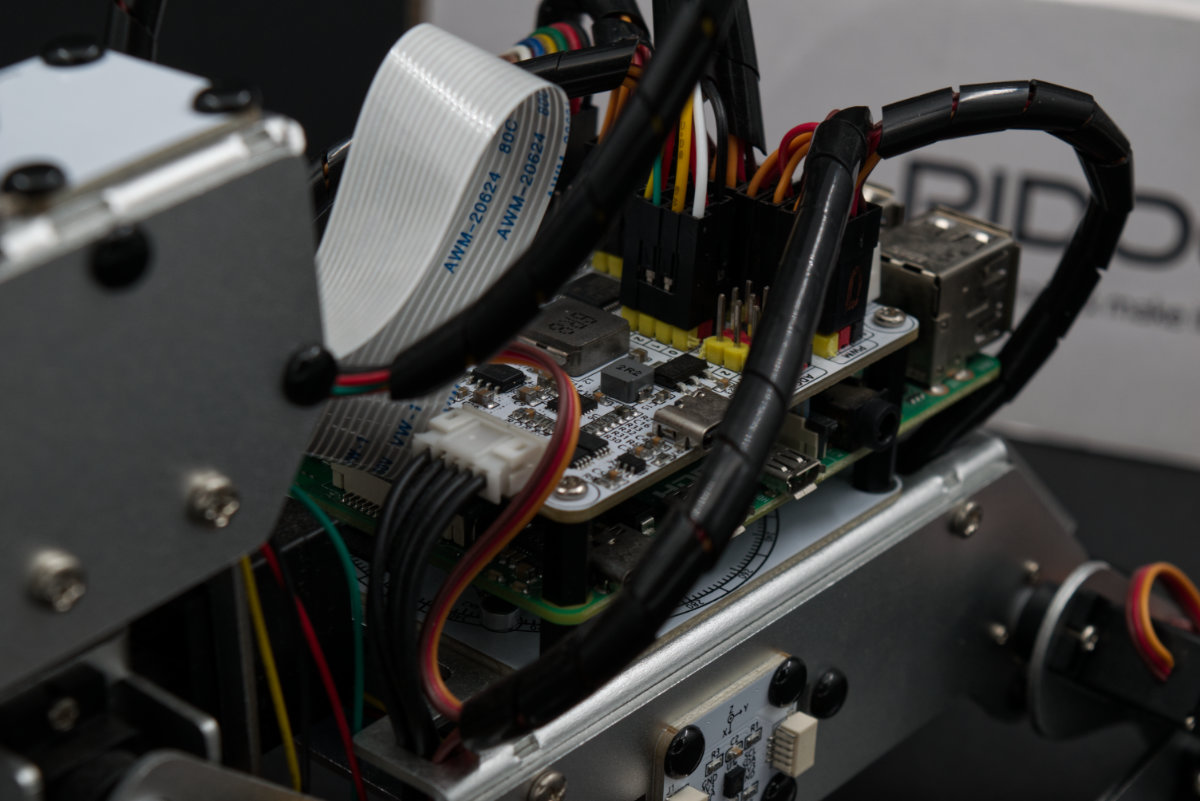
Svi potrebni kablovi su dati, a date su i prigodne plastične ovojnice za kablove kojima se na kraju oni grupišu i omotaju. Na taj način se kablovi i štite, ali i sam robot dobija uredan izgled.
Softver
Iako je za samo sastavljanje potrebno više časova, ipak modifikacija softvera ono za šta je PiDog predviđen i što donosi nova saznanja u smislu STEM obrazovanje. PiDog se programira iz Python-a i SunFounder je u svom uputstvu na sajtu dao detaljno opisane korake instalacije svih neophodnih programa, ali i Pidog biblioteke i presete akcija u zavisnosti od OS-a koji koristite.
Pidog Python biblioteka ima sve komande za pokretanje svakog od motora, kontrolu LED niza i očitavanje senzora. Pokretanjem preseta robot će uradini neku od složenih radnji, kao što je recimo kefćanje ili izvijanje tela. Preseti se sastoje od niza komandi Pidog biblioteke sa unapred upisanim parametrima karakterističnu za željeno ponašanje robota.
Robotom se upravlja startovanjem Python skripte sa računara. Pre toga, neophodno je da Raspberry Pi u PiDog-u bude povezan na istu Wi-Fi mrežu kao i vaš računar kako bi primio komandu i kako bi mogao da izvrši radnje koje želite da uradi. Dobro komentarisani primeri na wiki-u proizvođača čine da je proces upravljanja robotom izuzetno lak. Ukoliko želite da promenite neku od komandi, dovoljno je editovati Python dokument.
Od datih složenih skripti primera tu su: budjenje, patrola, odziv, odmor, praćenje lica, podizanje, zavijanje, praćenje lopte i upravljenje iz aplikacije. Ova poslednja skripta je donekle različita. Njenim startovanjem PiDog ne samo da izlazi na internet, već se povezuje sa PiDog aplikacijom za Android ili iOS iz koje je moguće komandovati kretanjem robota i radom kamere. Vaš tablet ili mobilni telefon postaju upravljačka konzola PiDog-a uz instaliranu aplikaciju preuzetu sa stora OS-a.
Utisci
U finalnoj verziji postupak instalacije i kalibracija motora su bez ikakvih neobjašnjivih koraka. Aplikacija za mobilne uređaje je laka za korišćenje i intuitivna. Kroz nju je moguće bežično upravljati PiDog-om. Impelmentirane su osnovne komande kretanja, kao i komanda PiDog-u da sedne, šeni, laje, legne, a snimak sa kamere se sve vreme nalazi u pozadina ekrana aplikacije.
Za $180 dolara bez dažbina carine i pošte, koliko košta PiDog dobija se robot u obliku psa. Izdvojene komponente svakako će koštati nešto više. Ovaj robot je sposoban da oponaša desetak složenih radnji kombinacijom komandi u preset akcijama.
PiDog je namenjen mladima od dvanaest godina i više. Osnovni cilj je podrška STEM obrazovanju kroz robot-učilo na kome se mogu razvijati algoritmi kretanja na četiri noge, kao i implementacija senzora koji oponašaju čula živog bića. Ovaj model nije gotov model sa zatvorenim softverom i definisanim performansama i mogućnostima, tako da nema smisla pričati o gipkosti pri kretanju, mogućnosti savladavanja prepreka i snalaženju u prostoru i porediti ga sa gotovim rešenjima. Ono što je njegova jaka strana je potpuno otvoren kod, Python biblioteke za kontrolu kretanja i očitavanje senzora, kao i veći broj primera u Python-u za kontrolu njegovog ponašanja. Zbog svega ovoga, PiDog se lako može inkorporirati u svaki napredan STEM kurs robotike i biti odlično učilo i platforma za dalji razvoj i sticanje praktičnih iskustava učenika u polju robotike.
Više informacija: SunFounder PiDog web site
