

YASKAWA HC10 Human-Collaborative roboti su najzahvalniji u automatskim procesima, smeštenim u veoma limitiranom prostoru uz neposrednu blizinu ljudi, sa čestim izmenama zadataka.

Neke osnovne prednosti su:
- Visoka radna sposobnost – ubrzani proizvodni ciklusi
- Brz povrat investicija
- Bezbednost – smanjenje rizika
- Jednostavnost – upotrebljiv u svakodnevnom radu u industriji
Ono što pruža visoku bezbednost u radu su svakako:
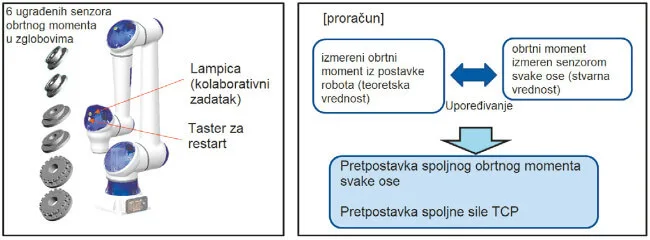
- 6 ugrađenih senzora obrtnog momenta,
- Mogućnost limitiranja snage i sile FSU (Functional Safety Unit) jedinicom,
- Safe speed monitoring (deo FSU),
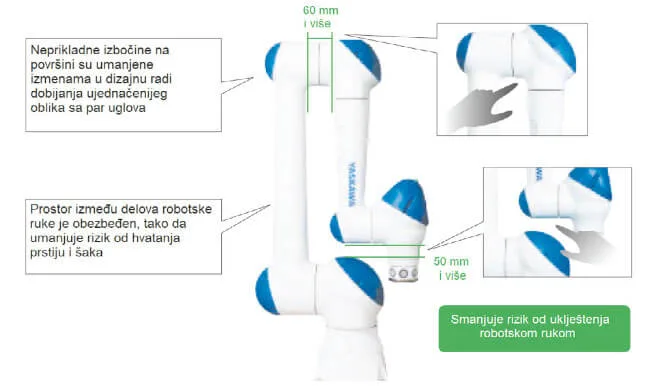
- Dizajn bezbedan od uklještenja,
- Ograničenja dejstva spoljne sile (PFL Functionality – Power and Force Limiting),
- Oslobađanje od funkcije stezanja (u situacijama kvazi statičkog stezanja),
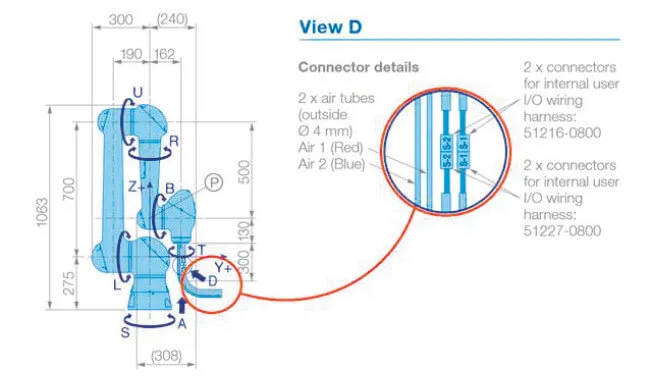
- Energetski vodovi integrisani u robotskoj ruci,
- Sertifikat: ISO 13849-1, PLd, Category 3.
Funkcija ograničavanja dejstva spoljne sile – PFL (Power and Force Limiting)
- Bezbednosna funkcija bazirana na informaciji od 6 senzora obrtnog momenta ugrađenih u robotskoj ruci
- Kada spoljna sila, koja dejstvuje na robota, dostigne granični nivo (svaka osa, TCP), robot staje
- Kada pritisnemo taster za restart, robot poništava pomenutu zaštitu i nastavlja kretanje
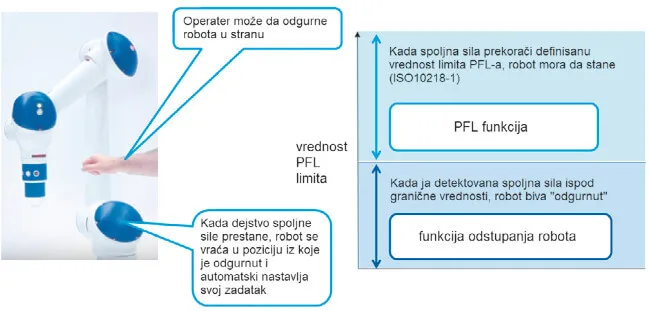
Funkcija odstupanja robotske ruke pod dejstvom spoljne sile
- Funkcija je bazirana na vrednosti spoljne sile dejstvovanom na telu robotske ruke
- U toku svog rada, robot može da bude pomeren u stranu, od strane korisnika u vektoru primenjene spoljne sile
- Kada dejstvo spoljne sile prestane, robot se vraća do tačke odakle je odgurnut i nastavlja svoj zadatak
Uz robota HC10 imamo i HC10DT, koji dodatno daje mogućnost lakog upravljanja i učenja, odnosno, programiranja (EasyTeach), što naročito pogoduje korisnicima koji nemaju prethodnog iskustva sa robotima. Naime, posedovanjem DirectTeach tastera na robotskoj ruci i mogućnošću ručnog pomeranja robota, eliminiše se potreba za korišćenjem ručne programske jedinice i klasičnim programiranjem, čime se unapređuje i operativna sposobnost radnika koji radi sa robotom.

Ono što je za oba robota zajedničko, su osnovne tehničke specifikacije:
- broj upravljanih osa: 6
- maksimalna nosivost: 10kg
- poluprečnik dostupa: 1200mm
- ponovljivost: ±0,1
- masa: 47kg
- angažovana snaga, prosečno: 1 KVA
Uporedo sa razvojem robota HC10 i HC10DT, Yaskawa je uložila puno svog rada i ideja u upravljač YRC1000, najnovije generacije, koji je brži, precizniji i revolucionarno manji od svojih prethodnika – 598 (w) x 499 (h) x 427 (d) mm. Roboti tako sada postižu značajno višu tačnost i ponovljivost putanje nezavisno od brzine kretanja, a posebna prednost je pojednostavljena implementacija u postojećim industrijskim sistemima.
Za bolje performanse u Pick&Place zadacima i, kao i montaži, nezaobilazan je YRC1000micro upravljač, naravno, još manjih dimenzija – 425 (w) x 125 (h) x 280 (d) mm, koji je pogodan i za robote manjih nosivosti, kao GP7, GP8, GP12 i MotoMINI.

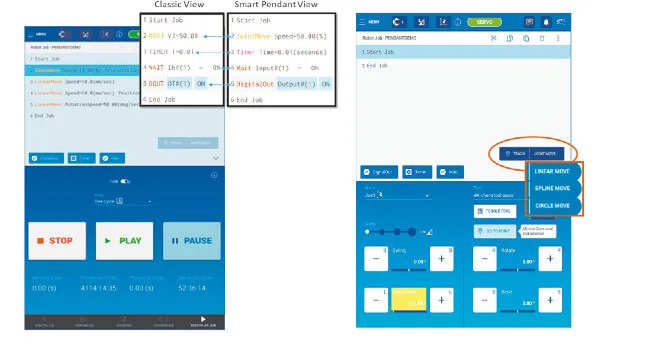
Kao i raniji upravljači, i YRC1000 se programira standardnom ručnom jedinicom, teach pendantom, ali i takođe novim SmatPendant-om, sa ekranom od 10 incha, osetljivim na dodir.

Nova programska jedinica je inovativna za upotrebu, pogotovo za česte izmene zadataka robota. Lako prati krivulje, zbog čega je idealan za nove korisnike, a uz sve to, poseduje ugrađenu SmartFrame, patentiranu tehnologiju, kojom određuje korisničku orijentaciju prema robotu, čime umesto konvencionalnih koordinata (X,Y,Z), koristi klasičan, prirodan jezik za komande u programiranju (sa Favorites bar-om), bez potrebe pamćenja skraćenica.
Na kraju, da kažemo da, opisom samo nekih od brojnih i uveliko već sa zadovoljstvom primenjenih mogućnosti ovih robota i upravljača, vidimo da industrija odavno iščekuje ovakva rešenja u različitim delatnostima, počev od logistike, bravarskih radionica, mašinske obrade, kontrole kvaliteta, sastavljanja različitih sklopova, funkcionalnog testiranja i drugih, gde se stvaraju uspešne saradnje čoveka i robota u cilju beskompromisne bezbednosti i veće produktivnosti.
Više informacija: YASKAWA Slovenija d.o.o, Tel: +386 (0)1 83 72 410, YSL-info@yaskawa.eu, www.yaskawa.sl