


Inžinjeri mogu promašiti u koncepciji ako biraju veličinu servo motora na osnovu:
- Veličine snage ili trenutno instaliranog motora ili isključivo na osnovu momentnih zahteva.
- Drugi promašaj je da odnos inercija mora biti 1:1.
Međutim, cilj nije da postignemo specificiran odnos inercija motora i tereta već da izaberemo najbolji motor za datu aplikaciju. Mnogo faktora je važno za izbor servo motora uključujući i:
- cenu,
- ambijentalne uslove,
- rezoluciju enkodera,
- zahevanu snagu,
- prostorna ograničenja.
Najkritčniji faktori u procesu odabiranja mogu biti sledeća četiri:
- odnos inercija,
- brzina,
- maksimalni moment,
- RMS moment.
Odnos inercija
Prvi ključni faktor je odnos momenta inercija. Moment inercije je mera koliko teško možemo da promenimo brzinu objekta. Moment inercije sistema može biti podeljen u dva dela: moment inercije motora i moment inercije opterećenja. Moment inercije motora Jm je definisao proizvođač i može se naći u dokumentaciji motora. Međutim, moment inercije opterećenja često sadrži mnoge komponente. Svaka komponenta koju motor pomera utiče na ukupan moment inercije koji je određen primenom jednačina za svaku komponentu.
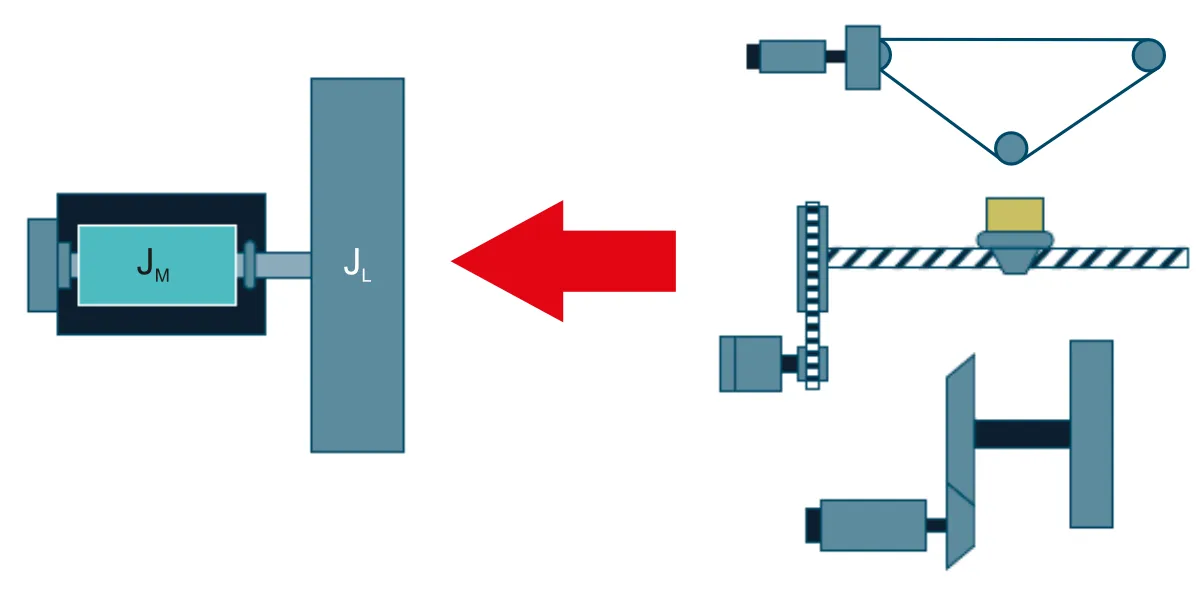
opterećenja mora biti izračunat na osnovu komponenata sistema | photo: ICM Electronics
Odnos inercija je tipično 5:1 za mnoge aplikacije. Performanse se poboljšavaju ako je ovaj odnos manji, često ispod 2:1 ili 1:1 ili niže. Ali kada performanse nisu krtitične ovaj odnos može bit 10:1, 100: 1 ili više. U svakom slučaju, performanse rastu kada odnos inercija pada i podešavanje kontrolne petlje je lako. Ukoliko je odnos inercija previše mali motor troši energiju samo za savladavanje sopsteve inercije rotora što opet nije dobro, a i nepotrebno poskupljuje rešenje. Ukoliko je odnos inercija limitirajući faktor, potrebno je da dobro razumemo performanse pre nego predložimo veći odnos.
Krive moment-brzina
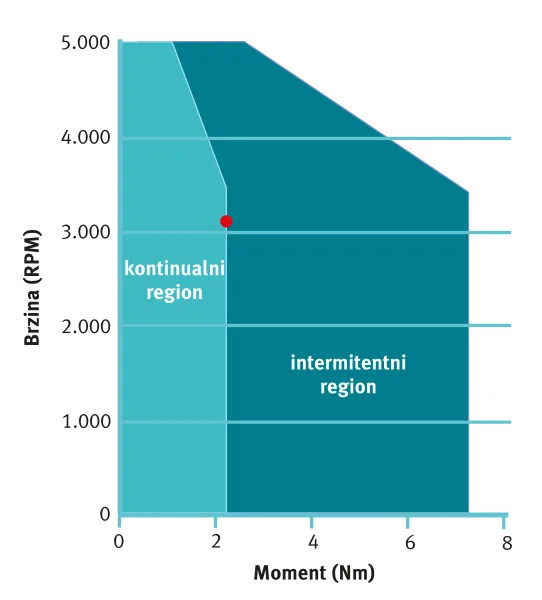
Može biti određeno nekoliko motora koji daju odgovarajući odnos inercija. Posao je da nađemo najmanji, najefikasniji motor koji će da odgovori zahtevima proizvodnje zadate brzine i momenta. Mogućnosti motora po pitanju brzine i momenta su dati u katalogu proizvođača za svaki motor pojedinačno karakteristikama momentbrzina. Krive moment-brzina pokazuju nekoliko tačaka od interesa. Nominalni moment je maksimalni moment koji motor može proizvoditi kontinualno pri nominalnoj brzini ili niže a da se ne pregreva. Ovaj moment daje 100 procenata vrednosti momenta. Slično tome, nominalna brzina je brzina pri kojoj je nominalni moment raspoloživ. Motor može kontinualno raditi brže od nominalne brzine ali mu moment značajno pada sa porastom brzine. Maksimalna raspoloživa brzina motora je data kao vrh krive moment-brzina, a maksimalni moment kao najdalja desna tačka krive na slici 2.
Kriva moment-brzina ima dva regiona, kontinualni i intermitentni. Ako je kombinacija moment-brzina, zahtevana od aplikacije, mora da se uvek nađe u kontinualnom području. Motor uvek mora proizvoditi brzinu i moment bez šanse da se pregreje. Ako je kombinacija moment-brzina pada u region intermitentnog momenta, motor može proizvoditi brzinu i moment samo u ograničenom vremenu. Ako je to vreme prekoračeno motor će početi da se pregreva. Da spreči oštećenja zbog pregrevanja moderni regulatori generišu alarmno stanje ukoliko je vremenska granica prekoračena. Ali kada su zahtevani kratkotrajni visoki momenti, takvi kao što su momenti ubrzanja i usporenja, motor može raditi pouzdano. Veličina momenta koji motor može proizvoditi iznad nominalnog i vreme koje to može raditi variraju u zavisnosti od proizvođača.
RMS moment (koren srednje vrednosti kvadrata momenta, srednji moment) mora ležati unutar kontinualnog regiona. Ukoliko neka kombinacija brzine i momenta leži van ovih regiona (kontinualnog i intermitentnog) motor neće moći da proizvodi tu kombinaciju momenta i brzine.
Kada selektujete motor, imperativ je da obezbedite da kriva moment-brzina budu efektivni.
Profil kretanja
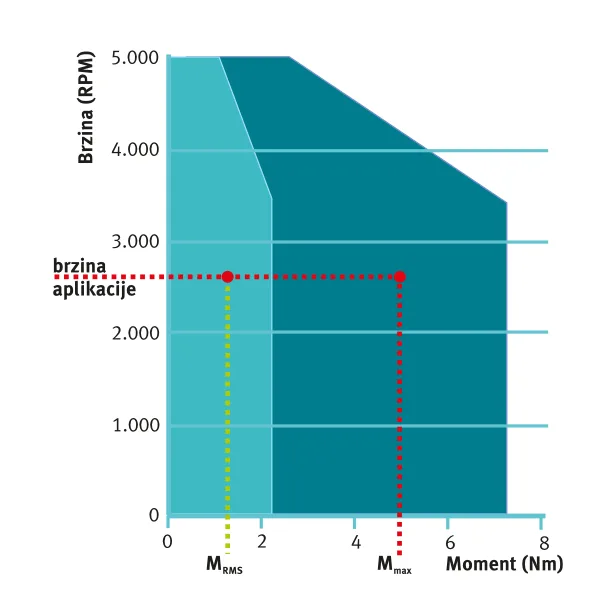
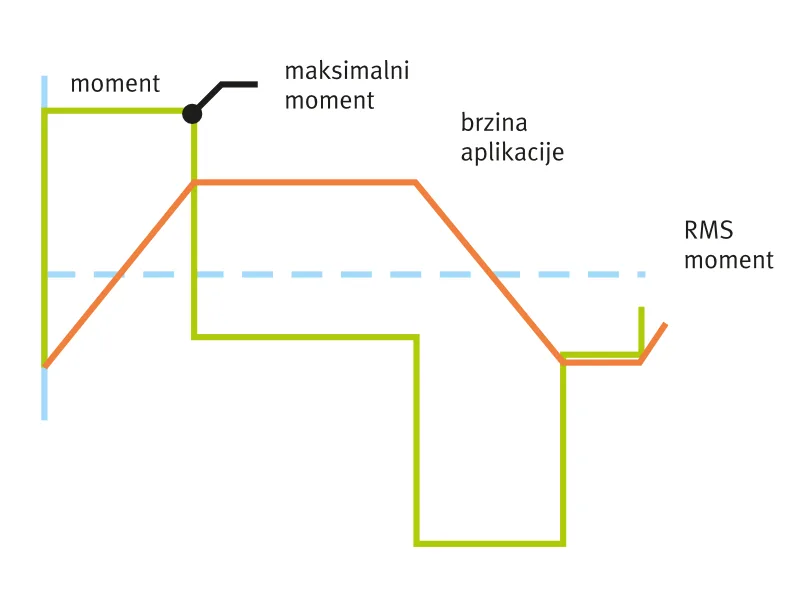
Dok su mogućnosti motora najbolje opisane krivom moment-brzina, zahtevi aplikacije su najbolje opisani profilom kretanja i profilom momenta kao na slici desno. Profil brzine je grafička prezentacija brzine motora u vremenu a profil momenta ilustruje zahteve mašine za momentom koji će slediti profil brzine u istom tom vremenu.
Maksimalni moment
Momenat na početku trapeznog profila je maksimalni moment jer pokriva mehanička trenja i ubrzanje masa (dinamički moment). Ova tačka profila je nazvana maksimalni moment. Kada je maksimalna brzina dostignuta i motor se kreće konstantnom brzinom (nema ubrzanja) motor pokriva moment trenja i statički moment i održava brzinu. Za usporenje procesa često je potreban reversan moment. Reversni moment nije tako visok kao startni jer ga smanjuju momenti trenja, tako trenje pomaže usporenju opterećenja. Kada je trenje previsoko moment za napred možda bude potreban za vreme usporenja tako da se opterećenje ne usporava prebrzo. Idealan slučaj je da maksimalan moment pada u region intermitentnog momenta krive moment-brzina. On takođe može pasti u region kontinualnog momenta, ali je to znak da je motor možda predimenzionisan.
RMS moment
Drugi proračun momenta kritičan za aplikaciju je RMS moment, vremensko težište, sredina momenta za vreme kompletnog mašinskog ciklusa ili ekvivalent momentu stalnog stanja. Na primer, moment od 1,2Nm RMS momenta će proizvoditi rast temperature kao da kontinualno radi sa 1,2Nm. Tako je veoma važno da obezbedimo da RMS pada unutar kontinualnog regiona krive moment-brzina. Određivanje veličine i izbor motora je zasnovan na proračunu momenta i inercije sa mehaničkom montažom plus brzinskim i aplikacijama ubrzanja. Izabrani moto mora biti sposoban da pokreće mašinu obezbeđujući dobar moment i brzinu.
Proces odabiranja uključuje sledeće korake:
- Utvrđivanje ciljeva kretanja
- Selekciju mehaničkih komponenti
- Definiciju ciklusa rada
- Proračun opterećenja
- Izbor motora
Utvrđivanje ciljeva kretanja
Prikazivanje strukture kontrole kretanja aplikacije će pomoći da utvrdite nužne parametre potrebne za sledeći korak
- Zahtevana poziciona tačnost?
- Zahtevana poziciona ponovljivost?
- Zahtevana tačnost brzina?
- Linearna ili rotaciona aplikacija.
- Ako je linearna: Horizontalna ili vertikalna?
- Termička razmatranja – Ambijentna temperatura.
- Koje topologije motora najbolje odgovaraju aplikaciji?
Izbor mehaničkih komponenti
Morate odlučiti koje mehaničke komponente trebaju aplikaciji. Na primer, linearna apliakcija može zahtevati pužno pomeranje ili konvejer. Za prenos brzine može biti korišćen reduktor ili remeni prenos.
- Direktno pokretanje?
- Specijalna aplikacija ili standardni mehanički uređaji?
- Ako je linearna aplikacija: Koristiti pužno pomeranje, linearni motor ili konvejer?
- Zahtevana redukcija-reduktor ili remeni prenos?
- Testirati dimenzije vratila-izabrati povezivanje (kuplovanje).
- Testirati mehaničke komponente za limite brzine i ubrzanja.
Definisanj ciklusa tereta (ciklusa rada)
Morate definisati maksimalnu brzinu, maksimalno ubrzanje, vremenski ciklus rada, rampe ubrzanja i usporenja, vreme stajanja i druge specifičnosti aplikacije:
- Definisati kritične parametre kretanja kao što su brzina i ubrzanje.
- Trougani ili trapezoidni ili neki drugi profil kretanja?
- Ako je linearna apliakcija: Budite sigurni da ciklus rada ne prekoračuje put kretanja lineranog uređaja.
- Limitacija S-krivi.
- Razmatranje tereta.
- Da li se opterćenje menja za vreme ciklusa rada?
- Da li se kočnica koristi za vreme mirovanja?
Proračun opterećenja
Opterećenje je definisano momentom koji je potreban da pokreće mehaničke komponente.Iznos momenta je određen sa inercijom od mašinerije (mehaničkih delova) svedenih na motor pa sve do motora i ubrzanja vratila motora.
- Kalkulisanje inercija svih mehaničkih delova
- Određivanje inercija svedenih na motor
- Određivanje brzine, ubrzanja na vratilu motora
- Izračunavanje momenta ubrzanja na vratilu motora
- Određivanje ne inercijalnih sila kao što su gravitacija, trenje i dr.
- Izračunavanje konstantnog momenta na vratilu motora
- Izračunavanje ukupnog ubrzanja i RMS momenta na vratilu.
Izbor motora
Motor mora biti sposoban da obezbedi zahtevani moment mašine plus moment zbog uticaja sopstvenog rotora. Svaki motor ima specifičnu inerciju rotora koja utiče na moment celog sistema. Kada selektuje motor, trebate za svaki odabran motor ponovo preračunati moment.
- Odlučiti o kontrolnoj tehnologiji motora (DC sa četkicama, bez četkica, steper, AC sero ili neki drugi..).
- Odabrtai motor-drajv kombinaciju.
- Da li motor podržava zahtevanu maksimalnu brzinu? Ako ne, selektovati drugi motor-drajv.
- Koristite inerciju rotora da izračunate sistemsko ubrzanje (motor plus mehaničke komponente – pik) i RMS moment.
- Da li motorov nominalni moment podržava sistemov RMS moment? Ako ne, selektujte drugi motor.
- Da li motorov intermitentni moment podržava sistemov pik momnet? Ako ne, selektujte drugi motor.
- Da li motorova kriva performansi (karakterisitka moment – brzina) podržava moment i brzinske zahteve?
Ako ne, selektujte drugi motor. Ako odnos inercije rotora i tereta prekoračuje određeni odnos (za servo motore je 5:1) razmotrite korišćenje reduktora ili povećanje prenosnog odnosa postojećeg reduktora. Servo motor ne treba da radi sa odnosom većim od 10:1.
Napomene: Proračun motora koji je za 20% veći od zahtevanog je prihvatljiv. Faktor preopterećenja treba da bude implementiran za vreme proračuna i testiranja momenta. U ovom slučaju, takođe je prihvatljivo korišćenje većeg faktora za moment ubrzanja. Cilj dimenzionisanja motora je da nađe optimalan motor za aplikaciju.
Definicija ciklusa opterećenja (ciklusa rada)
Ciklus opterećenja, t.j. način stavrnog kretanja koje je primenjeno može imati različite karakteristike. Postoje jednostavne aplikacije slične ventilatorima, pumpama, konvejerima i dr. koje imaju konstantan ili eksponencijalni moment u vrlo dugom periodu vremena. Odbair veličine motora za ove aplikacije je daleko jednostavniji i ne zahteva analize ciklusa rada jer se opterećenje ne menja u ciklusu rada.
Najednostavnije forme ciklusa tereta su trougaona i trapezoidna. One definišu većinu kritičnih podataka kao što su maksimalna brzina, ubrzanje i one su dovoljne da pokriju najvažnije aplikacije i zahteve koji određuju zahteve momneta. Naravno da postoje daleko složeniji profili kretanja koji zahtevaju detaljno određivanje momenta. Ovde će biti razmatrano samo trougaono i trapezoidno kretanje.

Za nehorizontalne linearne aplikacije, t.j opterećenja koja se pod uglom kreću gore ili dole, važno je razmotriti korišćenje kočnice. Motor treba da kompenzuje gravitacionu silu za vreme stanja mirovanja t.j. kretanja nultom brzinom koja prouzrokuje većim momentnim zahtevima.
Više informacija: ICM electronics d.o.o., Vase Miskina Crnog 4, 21000 Novi Sad, Srbija, Tel: +381 21 518-458, Tel: +381 21 518-777, http://www.icm.rs

